Author: Denis Avetisyan
A new approach combines graph neural networks and model predictive control to enable real-time command of complex systems like soft robots.
This work presents a framework integrating Graph Neural Networks with Model Predictive Control via a condensing algorithm for efficient control of high-dimensional dynamics.
Controlling complex, high-dimensional systems presents a significant challenge due to the computational burden of accurate dynamics modeling and real-time control. This work, ‘Graph Neural Model Predictive Control for High-Dimensional Systems’, introduces a novel framework integrating Graph Neural Networks (GNNs) with Model Predictive Control (MPC) to address this limitation. By representing system dynamics with sparse GNNs and employing a tailored condensing algorithm, we achieve efficient, scalable control of systems with up to 1,000 nodes at 100 Hz, demonstrated both in simulation and on a physical soft robotic trunk. Can this approach unlock effective control strategies for even more complex, previously intractable high-dimensional systems?
Modeling Complexity: The Pursuit of Essential Representation
Effective control of complex systems, particularly those exhibiting the adaptable yet challenging dynamics of soft robotics, fundamentally relies on accurate modeling of their nonlinear behavior. Unlike rigid systems governed by predictable equations, soft robots – constructed from compliant materials – respond to stimuli in ways that are inherently nonlinear, meaning a small input can produce disproportionately large or unexpected outputs. Capturing these intricacies is not merely a matter of increasing model complexity; it requires techniques that can represent the system’s state space and predict its evolution even with limited data. Consequently, researchers are increasingly focused on developing modeling frameworks capable of representing these nonlinearities without succumbing to the computational burdens associated with traditional methods, opening avenues for real-time control and robust performance in unstructured environments.
The pursuit of controlling complex systems, such as those found in advanced robotics and biological modeling, is frequently hampered by the inherent challenges of high dimensionality and computational expense. Traditional modeling techniques, while effective in simpler scenarios, often require exponentially increasing resources as the number of variables and interactions within a system grows. This computational burden restricts their applicability to real-time control loops, where timely predictions and adjustments are crucial. The sheer volume of data needed to accurately represent and predict system behavior, coupled with the processing power required to analyze it, creates a significant bottleneck. Consequently, achieving responsive and adaptable control over these intricate systems remains a substantial hurdle, necessitating the development of more efficient and scalable modeling approaches.
The ability to accurately forecast a system’s future behavior is paramount for effective control, a challenge particularly acute in complex applications like robotics and fluid dynamics. Recent research demonstrates a novel approach to this predictive hurdle, achieving root mean squared error (RMSE) in open-loop prediction that rivals the performance of established Koopman operator models – a benchmark for accuracy in nonlinear systems. Importantly, this new methodology surpasses the predictive power of more conventional techniques, including State Space Models (SSM) and Multi-Layer Perceptrons (MLP), suggesting a significant advancement in the field of dynamical systems modeling and control. This improved predictive capability unlocks possibilities for more robust and responsive control strategies in a wide range of complex systems, moving beyond the limitations of traditional predictive models.
Graph Networks: Local Interaction as a Guiding Principle
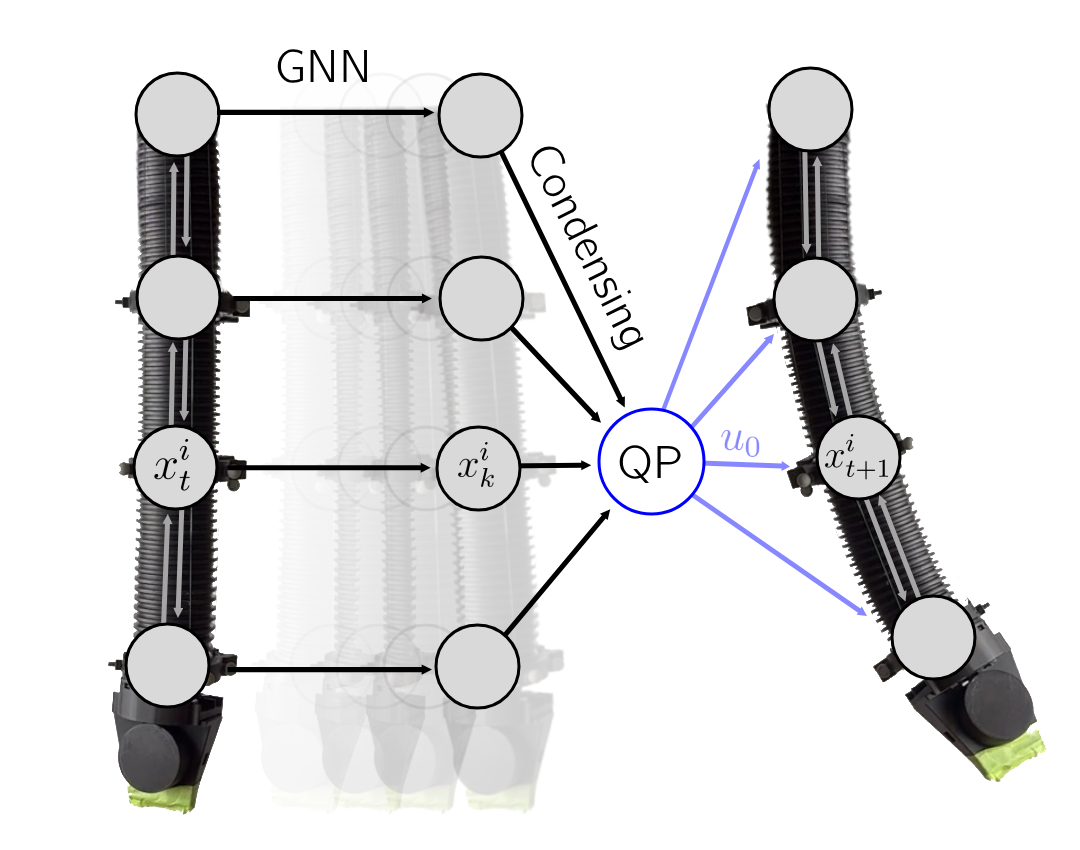
The robot’s dynamic model is represented using Graph Neural Networks (GNNs) predicated on the principle of localized interactions; this means the system’s state is defined by nodes representing components, and edges define relationships between them. GNNs enable the modeling of complex systems where interactions are not globally connected, but rather restricted to neighboring components. This approach leverages the assumption that a component’s state is primarily influenced by its immediate surroundings, reducing the need to model long-range dependencies. Consequently, the computational graph mirrors the physical structure of the robot, allowing for efficient learning and prediction of the system’s behavior based on local information exchange.
Employing Graph Neural Networks facilitates the learning of a structured system representation by explicitly encoding relationships between components as edges in a graph. This structured approach contrasts with traditional methods requiring manual feature engineering or complete state-space discretization, thereby simplifying the modeling process. The localized nature of GNN operations – processing information only within immediate neighborhoods – drastically reduces the number of parameters needed to represent the system’s dynamics. This reduction in model size directly translates to lower computational complexity during both training and inference, enabling efficient learning and real-time control applications. Furthermore, the learned representation is inherently transferable, allowing the model to generalize to variations in system configuration or external disturbances without retraining the entire network.
Restricting interactions to a limited neighborhood of nodes within the graph neural network significantly improves computational efficiency. This localized approach reduces the number of parameters required to model the system, scaling favorably with the size of the robot and its degrees of freedom. Empirically, this localized interaction scheme maintains accuracy comparable to fully connected graph neural networks, as the essential dynamics of robotic systems often arise from immediate, proximal relationships between components. The radius of this neighborhood is a hyperparameter tunable to balance computational cost and representational capacity, enabling adaptation to varying system complexities and data availability.
Dimensionality Reduction: Streamlining Control Through Essential Variables
The Condensing Algorithm is implemented to decrease the computational burden of optimal control by reducing the dimensionality of the control problem. This is achieved through a systematic reduction of the state and input spaces while preserving system controllability and observability. The algorithm identifies and eliminates redundant or weakly influential variables, creating a condensed model suitable for real-time optimization. This dimensionality reduction directly translates to lower computational costs in solving the optimization problem, enabling sustained control frequencies necessary for dynamic systems. The resulting condensed model maintains sufficient accuracy for effective control while significantly decreasing the resources required for computation.
The Condensing Algorithm capitalizes on the sparse structure of the linearized system dynamics derived from the Graph Neural Network (GNN). This sparsity-meaning a high proportion of zero values in the relevant matrices-significantly reduces computational demands during control optimization. Traditional methods require processing all elements of a matrix, leading to quadratic or cubic scaling with system size; however, by focusing only on non-zero elements and their associated connections, the algorithm achieves a substantial reduction in both memory usage and processing time. This allows for efficient calculation of control actions even for systems represented by large state-space matrices, ultimately decreasing the overall computational burden.
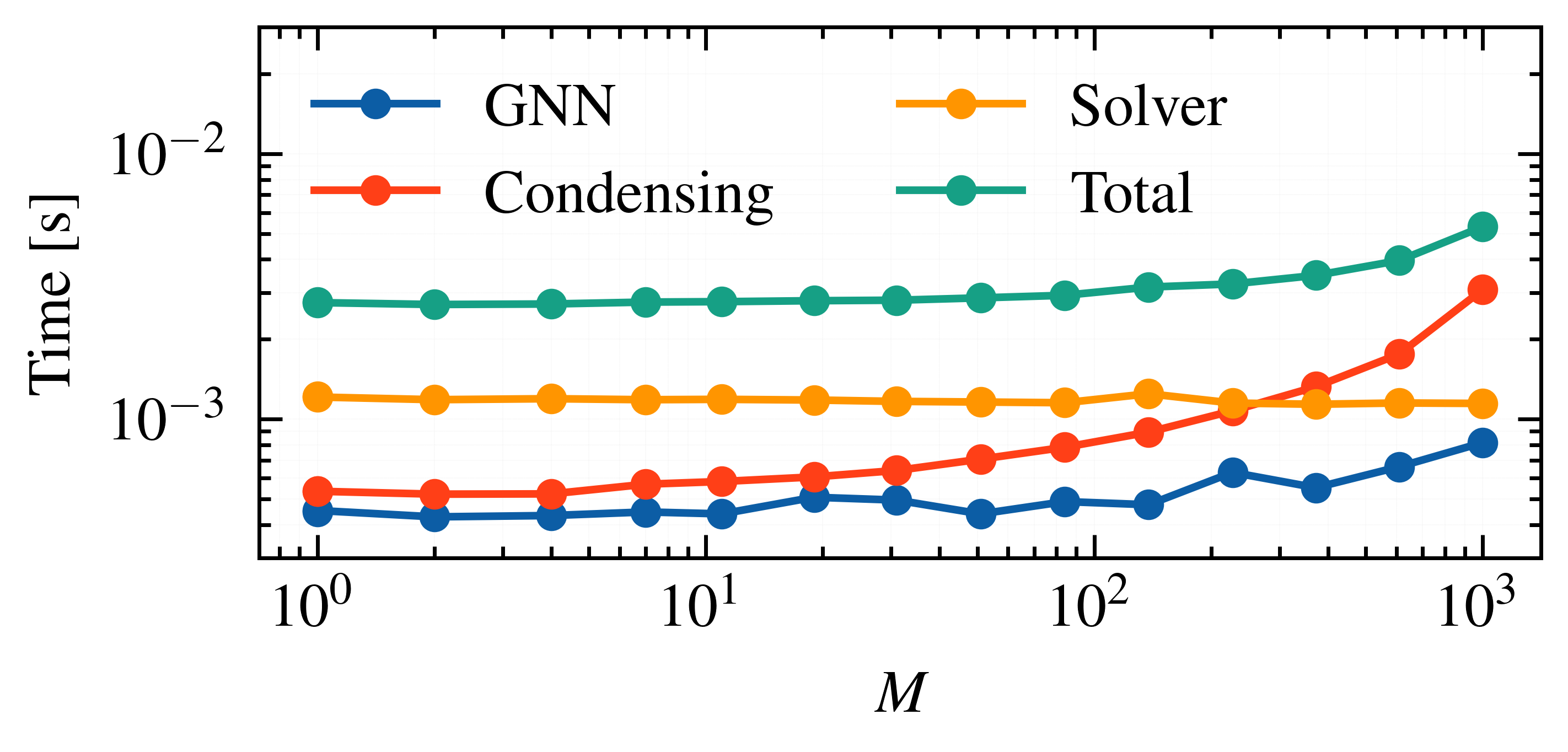
The dimensionality reduction process yields a control model that scales linearly with the number of graph nodes, meaning computational cost increases proportionally to system size. This characteristic enables efficient control of increasingly complex systems; testing demonstrates a sustained control frequency of 100 Hz is maintained for systems containing up to 1,000 nodes. This linear scaling is critical for real-time applications and extends the applicability of the control algorithm to larger and more intricate networks than would be feasible with methods exhibiting higher-order computational complexity.
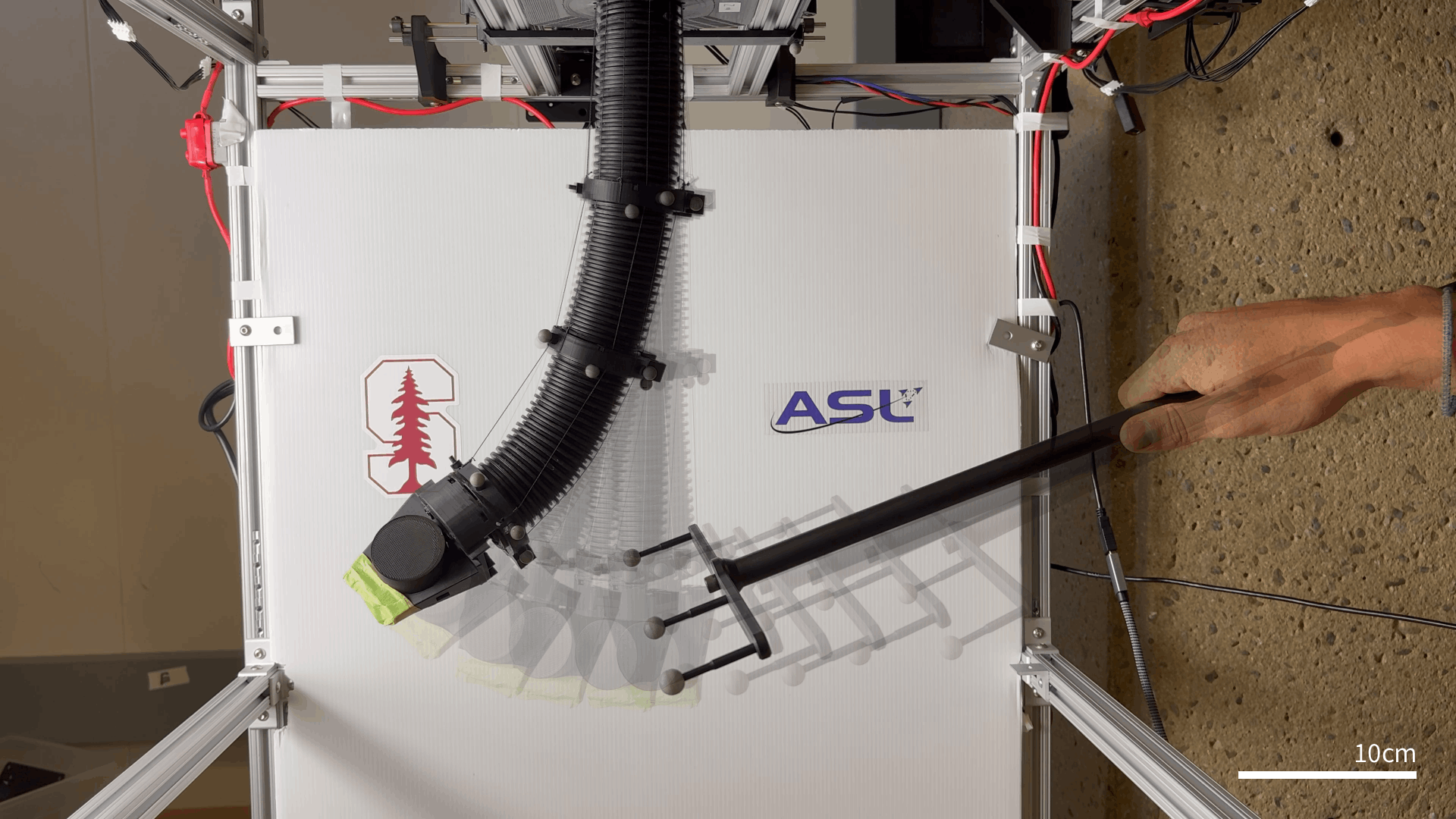
Hardware Validation: Demonstrating Robust Performance in the Physical World
A tendon-driven trunk robot served as the physical platform for validating the newly developed control framework. This hardware experimentation was crucial, moving the research beyond simulation and into the complexities of a real-world robotic system. The robot’s design, utilizing tendons to articulate movement, presented unique challenges in control precision and dynamic response. Researchers rigorously tested the framework’s ability to manage these challenges, focusing on its performance in executing complex motions and adapting to unforeseen disturbances. The results of these hardware trials directly informed refinements to the control algorithms, ensuring their robustness and practical applicability to soft robotic systems designed for dynamic and unpredictable environments.
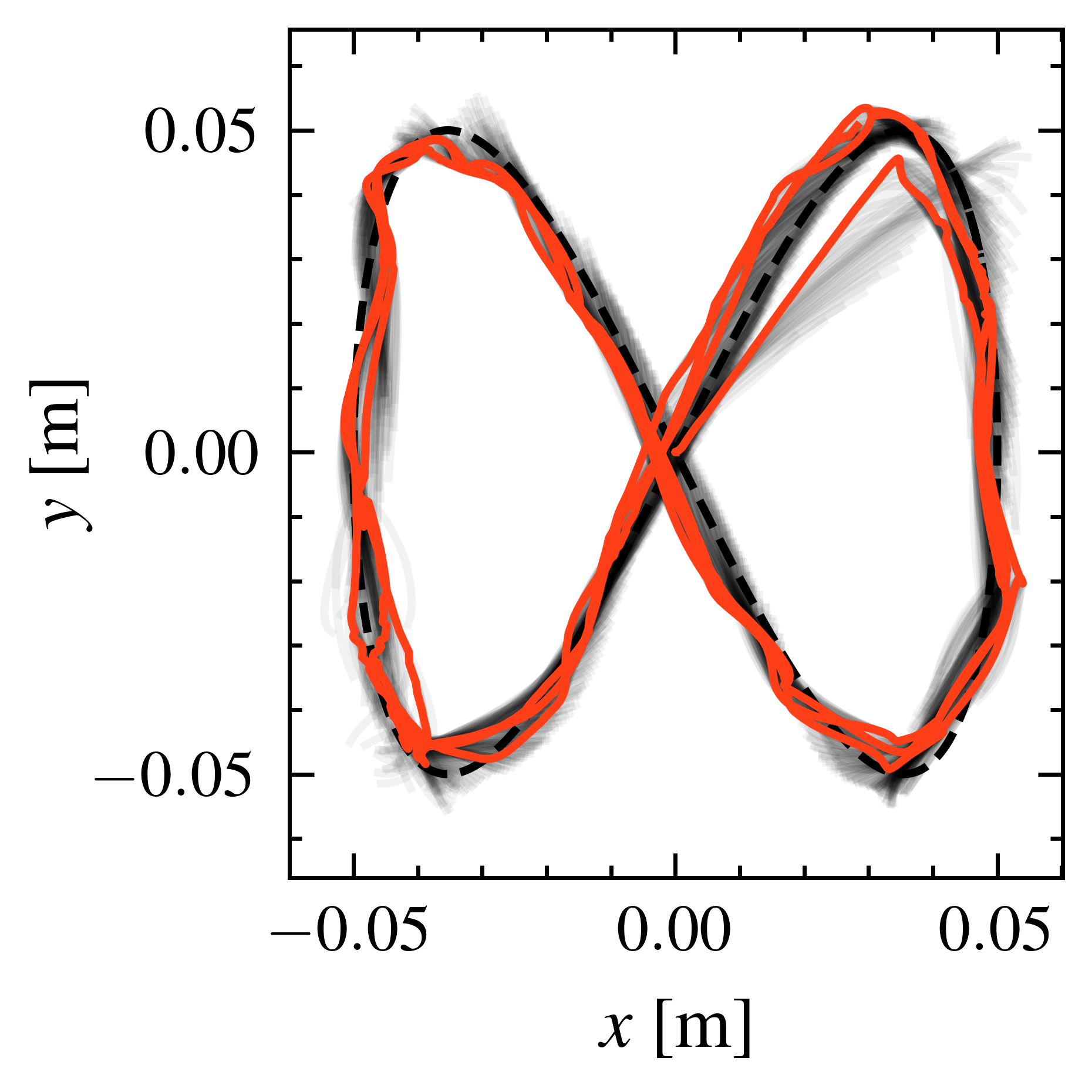
The tendon-driven trunk robot’s successful demonstration of obstacle avoidance highlights the practical robustness of the developed control framework. Navigating a dynamic environment filled with unforeseen challenges, the robot autonomously adjusted its movements to circumvent obstructions without compromising its primary task. This capability wasn’t simply programmed, but emerged from the framework’s ability to integrate sensor data and dynamically replan trajectories. The successful avoidance maneuvers demonstrate the system’s capacity to bridge the gap between simulated environments and the unpredictable nature of real-world applications, suggesting potential for deployment in complex and cluttered spaces where adaptability is paramount.
Rigorous validation utilizing a motion capture system demonstrated a substantial improvement in trajectory tracking accuracy for the tendon-driven trunk robot. Data collected during dynamic experiments revealed that the proposed control strategy reduced trajectory error by 63.6% when contrasted with existing baseline methods. This significant reduction confirms not only the accuracy of the developed model in representing the soft robotic system, but also the effectiveness of the control framework in enabling precise and reliable movements within a complex, real-world environment. The results highlight the potential for this approach to advance the capabilities of soft robots in applications requiring nuanced and adaptive locomotion.
The pursuit of controlling high-dimensional systems, as demonstrated in this work integrating Graph Neural Networks and Model Predictive Control, often leads to unnecessarily complex architectures. This research actively resists that tendency, favoring a condensing algorithm that distills information from the sparse structure of GNNs. It echoes the sentiment of David Hilbert, who once stated: “One must be able to say at all times what one knows and what one does not.” The framework presented embodies that principle; it doesn’t attempt to model every nuance, but rather focuses on distilling the essential dynamics, achieving real-time control with remarkable efficiency. The condensing approach isn’t merely a technical detail; it’s an assertion that clarity, not exhaustive detail, is the hallmark of true understanding.
Further Directions
The condensation presented here addresses computational burden, yet sidesteps the question of information loss. Future work must quantify this loss-not merely demonstrate performance-and explore strategies for intelligent discarding. A model’s elegance is not its complexity, but its parsimony. Current formulations assume static graph structure; extending this to dynamically changing topologies-systems that become more complex-remains an open challenge. Such adaptation demands a rethinking of the condensing algorithm itself.
Real-time control, while demonstrated, remains tethered to specific system parameters. Generalization-the ability to transfer learned dynamics to novel configurations-is the elusive goal. This necessitates investigation into meta-learning approaches, or perhaps a shift towards entirely data-driven, model-free control schemes informed by the GNN’s representational power. Clarity is the minimum viable kindness; a controller which demands excessive tuning is, ultimately, unkind.
The framework’s reliance on accurate system identification introduces a familiar fragility. Robustness to model uncertainty-to the inevitable imperfections in our understanding-is paramount. The pursuit of perfect models is a distraction. Better to embrace imperfection, and design controllers that tolerate it.
Original article: https://arxiv.org/pdf/2602.17601.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Netflix’s Little House On The Prairie Reboot: Release Date, Cast & Everything We Know
- Off Campus Season 1 Soundtrack Guide
- Silver Rate Forecast
- Prime Video’s New R-Rated Spy Thriller Is Officially No.1 On Streaming Despite Poor Reviews
- Gold Rate Forecast
- Brent Oil Forecast
- EUR ZAR PREDICTION
- Amazon Primes new GenAI cartoon looks like K-Pop Demon Hunters with aliens
- Inkford Hermitage Chest Locations In HSR (Honkai: Star Rail)
- KPop Demon Hunters Meets Avatar: The Last Airbender In Netflix’s 3-Part Fantasy Series
2026-02-21 01:49