Author: Denis Avetisyan
Researchers are leveraging digital twin technology and advanced ray tracing to forecast V2X communication conditions before they occur, enabling proactive network optimization.
This paper details the implementation and evaluation of a real-time Network Digital Twin for V2X communication, analyzing the trade-offs between prediction accuracy, computational latency, and channel modeling fidelity.
Conventional reactive network management struggles to meet the demands of rapidly evolving Vehicle-to-Everything (V2X) applications. This paper, ‘Predicting Networks Before They Happen: Experimentation on a Real-Time V2X Digital Twin’, introduces a novel framework for real-time prediction by integrating live mobility tracking with deterministic channel simulation. Experimental results, validated through a deployment in Tokyo, demonstrate the ability to forecast network performance-specifically Received Signal Strength and Line-of-Sight transitions-with minimal latency and acceptable error. Can this approach unlock truly proactive network control and optimize the performance of future connected vehicle systems in complex urban environments?
The Imperative of Fidelity: Simulating Reality for Autonomous Systems
Conventional network simulations, while useful for basic connectivity testing, often employ abstractions and simplifications that prove inadequate for the demands of emerging technologies like autonomous driving. These models frequently represent vehicles as simple data packets moving through a network, neglecting the nuanced physics of vehicle dynamics, sensor behavior, and complex environmental interactions. Consequently, critical scenarios – such as the impact of varying weather conditions on sensor performance or the unpredictable behavior of pedestrians – are poorly represented, leading to inaccurate predictions and potentially unsafe system designs. The limitations of these simplified approaches highlight the need for more sophisticated simulation environments capable of mirroring the intricacies of real-world conditions with sufficient fidelity to ensure the reliability and safety of advanced, connected vehicle systems.
Modern urban landscapes, characterized by dense populations, intricate road networks, and dynamic real-time events, present a significant challenge to the development and testing of technologies reliant on vehicular communication and autonomous navigation. Consequently, a shift towards high-resolution, realistic simulations has become paramount, giving rise to the concept of Digital Twins. These virtual replicas of cities aren’t merely scaled-down models; they strive to mirror the complexities of the physical world, incorporating detailed building information, accurate traffic patterns derived from real-world data, and even the behavior of pedestrians. By creating a continuously updated, virtual counterpart, engineers and researchers can rigorously test algorithms and systems – such as connected and autonomous vehicles – in a safe and controlled environment, ultimately accelerating innovation and deployment in increasingly complex urban settings.
The development of dependable Vehicle-to-Everything (V2X) communication systems is significantly challenged by a fundamental trade-off within current simulation tools. Achieving highly accurate representations of complex, real-world urban scenarios-essential for testing V2X technologies-demands immense computational resources. Existing platforms often prioritize speed by simplifying environmental details and vehicle behaviors, resulting in simulations that lack the fidelity needed to reliably predict performance in genuine conditions. This imbalance introduces uncertainty in evaluating V2X safety and efficiency, potentially leading to flawed designs and compromised performance when deployed in real-world traffic. Consequently, advancements in V2X technology are hampered by the difficulty of creating simulations that are both detailed enough to be trustworthy and efficient enough to be practical.
VaN3Twin: A Ray-Tracing Framework Grounded in Physical Principles
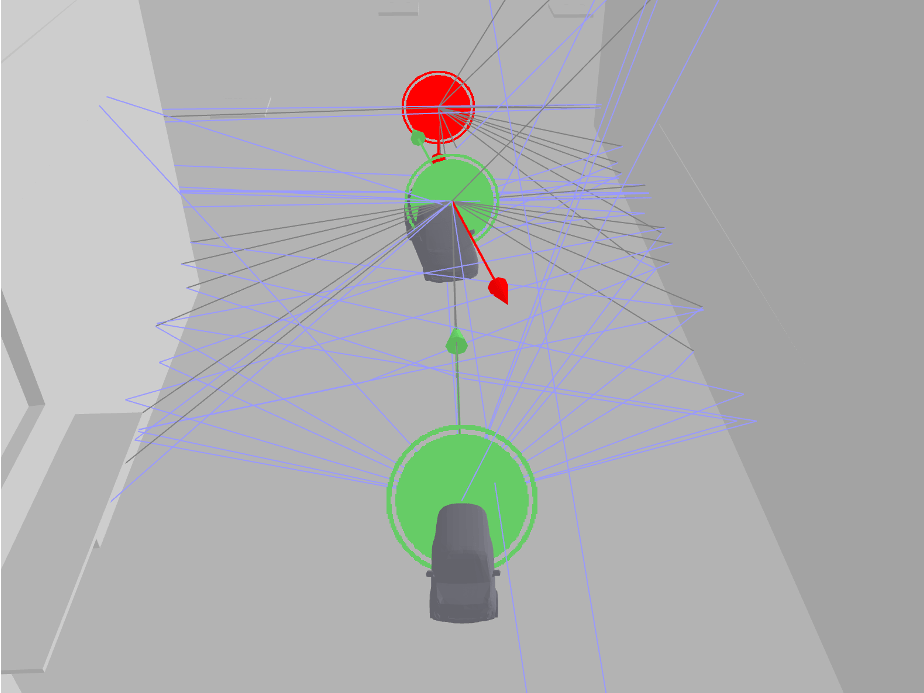
VaN3Twin builds upon the ms-van3t framework by incorporating Sionna RT, a ray-tracing engine designed for detailed wireless propagation modeling. This integration allows for the simulation of radio wave behavior based on physical principles, accounting for effects such as reflections, diffraction, and scattering within a defined environment. Sionna RT calculates signal paths and their associated characteristics – including path loss, delay spread, and angle of arrival – with a higher degree of accuracy than conventional methods. The engine’s computational capabilities facilitate the creation of detailed propagation maps, enabling realistic V2X (Vehicle-to-Everything) communication simulations and analysis.
Traditional wireless channel models, such as WINNER and the 3GPP TR 36.885/38.901 specifications, rely on statistical approximations and empirical data, which can lack the fidelity required for increasingly complex V2X applications and environments. VaN3Twin overcomes these limitations by employing ray tracing to simulate signal propagation at a granular level, accounting for effects like reflections, diffraction, and scattering with greater accuracy. This approach allows for the modeling of signal behavior based on the specific geometry and material properties of the environment, rather than relying on generalized statistical models, resulting in more realistic and reliable simulations of wireless communication performance.
The VaN3Twin framework utilizes Ethernet LAN connectivity to facilitate data transfer between the reconstructed Tokyo Mobility Digital Twin (DT) and the ray-tracing simulation environment. This network infrastructure provides the bandwidth and low latency required to stream the detailed 3D model of the Tokyo environment to the Sionna RT ray-tracing engine. Specifically, the Ethernet LAN enables the transfer of geometry data, material properties, and initial conditions necessary for accurate wireless propagation simulations. This connection supports real-time or near real-time simulation scenarios, allowing for dynamic testing of Vehicle-to-Everything (V2X) communications in a realistic urban setting.
VaN3Twin is designed with modularity to facilitate integration with existing simulation workflows. Specifically, the framework supports compatibility with MATLAB-based approaches, allowing users to leverage existing MATLAB scripts and toolboxes for analysis and processing of ray-tracing data. Furthermore, VaN3Twin can utilize pre-computed, offline ray-traced maps, eliminating the need for real-time ray tracing during simulation and enabling faster execution times for scenarios where the environment geometry remains static. This flexibility allows researchers and developers to choose the most appropriate method based on their specific requirements and available resources, promoting wider adoption and customization of the framework.
Parameterizing Fidelity: Balancing Precision and Computational Cost
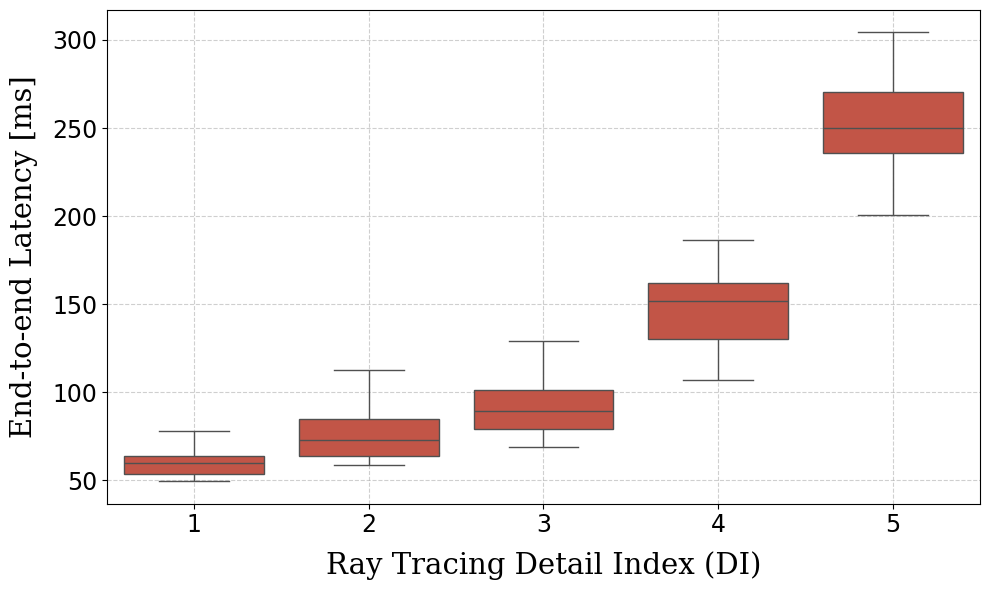
The Ray Tracing Detail Index (DI) functions as a numerical parameter that governs the complexity and accuracy of the ray-tracing calculations performed within the simulation environment. Increasing the DI value results in a more detailed and visually accurate rendering, achieved through a greater number of ray bounces and more complex shading models; however, this increased fidelity directly correlates with a rise in computational demand and, consequently, an increase in End-to-End Latency. Conversely, decreasing the DI value reduces computational load and latency at the expense of visual detail. This relationship allows for a tunable trade-off between rendering quality and real-time performance, enabling the system to adapt to varying hardware capabilities and application requirements. The DI is therefore a key control for balancing simulation accuracy and responsiveness.
VaN3Twin leverages the Tokyo Mobility Digital Twin (DT) to create simulations of complex urban environments. This integration is facilitated by the Wi-Fi Control Plane (CP), which provides the necessary communication infrastructure for data exchange between VaN3Twin and the DT. The Tokyo Mobility DT furnishes detailed and dynamic data regarding urban layouts, traffic patterns, and pedestrian movement, allowing VaN3Twin to accurately model real-world conditions. This capability is crucial for testing and validating autonomous systems, particularly in scenarios requiring navigation and interaction within dense urban landscapes. The Wi-Fi CP ensures efficient and reliable data transfer, enabling the simulation to reflect current and predicted urban states with high fidelity.
Data communication between VaN3Twin components utilizes User Datagram Protocol (UDP) for its low-latency, connectionless transmission, prioritizing speed over guaranteed delivery where occasional packet loss is acceptable. Payload formatting is consistently achieved through JavaScript Object Notation (JSON), a human-readable and machine-parsable data-interchange format. This standardization of data structure facilitates efficient parsing and processing across heterogeneous system components, reducing computational overhead and enabling scalable data exchange for real-time simulation and analysis within the Tokyo Mobility DT.
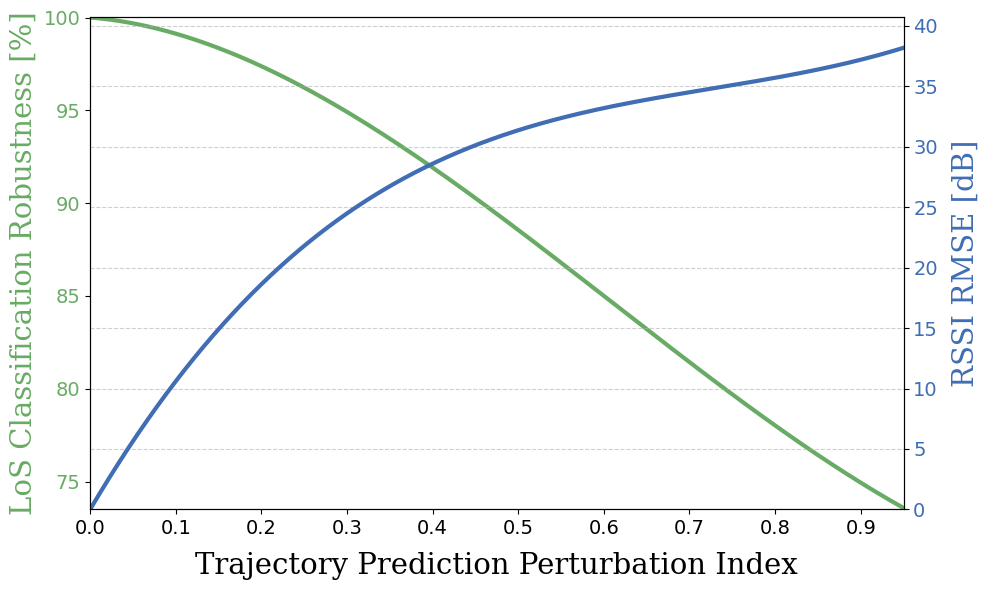
System accuracy is validated by achieving a Root Mean Squared Error (RMSE) of 20 for Received Signal Strength Indicator (RSSI) predictions, coupled with a positional error of 0.1 meters. This indicates that the predicted signal strength deviates from the actual measured value by an average of approximately 20 units, while the estimated location of the device is accurate to within 10 centimeters. These metrics, derived from testing within the Tokyo Mobility Digital Twin, demonstrate a high degree of precision in both signal propagation modeling and localization capabilities, crucial for applications requiring accurate positioning and radio frequency behavior assessment.
Line-of-sight (LoS) prediction accuracy within the system reaches 75% when evaluating positional error at a 1-meter tolerance. This indicates that, in testing scenarios, the system correctly identifies whether a direct, unobstructed path exists between communicating entities 75% of the time, with any incorrect predictions resulting in a positional deviation of no more than 1 meter. This level of accuracy is critical for realistic simulations of wireless signal propagation in urban environments, as LoS conditions significantly impact signal strength and reliability. The achieved performance suggests a robust algorithm for determining visibility between points, accounting for potential obstructions within the simulated Tokyo Mobility Digital Twin.
Towards Ubiquitous Connectivity: Applications and Future Trajectories
VaN3Twin provides a robust platform for innovating and validating Vehicle-to-Everything (V2X) applications, with a particular focus on advanced Driver-Assistance Systems (ADAS) leveraging cloud connectivity. This framework allows for the simulation of complex, real-world scenarios – from congested urban environments to challenging highway conditions – enabling developers to rigorously test ADAS features before deployment. By digitally replicating the interplay between vehicles, infrastructure, and the cloud, VaN3Twin facilitates the refinement of algorithms for cooperative perception, predictive maintenance, and over-the-air updates. The system’s capacity to model Vehicle-to-Cloud communication specifically addresses the growing need for cloud-based ADAS functionalities, such as high-definition mapping, real-time traffic information, and collaborative safety alerts, ultimately accelerating the development of safer and more efficient autonomous driving technologies.
The convergence of VaN3Twin with large-scale mobility Digital Twins, such as the TuST platform, represents a significant advancement in the ability to analyze complex transportation systems. This integration moves beyond isolated vehicle simulations by enabling holistic, system-level evaluations that account for the interplay between individual vehicles and the broader traffic environment. Researchers can now model and assess the impact of autonomous driving technologies-like cooperative adaptive cruise control or platooning-on network-wide performance, including traffic flow, congestion, and energy efficiency. By virtually replicating entire urban ecosystems, complete with diverse road geometries and realistic driver behaviors, this combined framework facilitates the proactive identification of potential bottlenecks and the optimization of traffic management strategies before real-world deployment, ultimately paving the way for safer, more efficient, and more sustainable transportation networks.
The accurate anticipation of other agents’ movements is paramount for the safe and effective operation of autonomous systems, and current limitations in trajectory prediction represent a significant hurdle. While models like the Constant-Velocity Motion Model offer a baseline for forecasting, their inherent simplicity often leads to substantial errors, particularly over extended prediction horizons or in dynamic environments. Research continues to refine these approaches, exploring methods to account for factors such as acceleration, turning rates, and behavioral intent. Minimizing trajectory prediction error isn’t merely a matter of improving algorithmic precision; it directly impacts the decision-making processes of autonomous vehicles, influencing path planning, collision avoidance, and overall system reliability. Consequently, continued investment in robust and adaptable prediction models remains a critical focus for advancing the field of autonomous systems and ensuring their safe integration into real-world scenarios.
The VaN3Twin framework distinguishes itself through its versatile support for a range of Vehicle-to-Everything (V2X) communication standards, encompassing established technologies like Dedicated Short-Range Communications (DSRC) via IEEE 802.11p, as well as cellular-based solutions such as Long Term Evolution-V2X (LTE-V2X) and the newer 5G New Radio V2X (NR-V2X). This multi-standard approach isn’t merely about present compatibility; it actively future-proofs the system against evolving automotive communication landscapes. By accommodating both current and emerging standards, the framework ensures that developed applications and testing protocols remain relevant as the automotive industry transitions towards increasingly sophisticated and interconnected autonomous systems, fostering a seamless integration with next-generation vehicle technologies and infrastructure.
The pursuit of a real-time predictive Network Digital Twin, as demonstrated in this work, echoes a fundamental tenet of computational rigor. It isn’t merely about achieving functional V2X communication; it demands a provably correct model capable of anticipating network behavior. As Donald Knuth once stated, “Premature optimization is the root of all evil.” This sentiment directly applies to the trade-offs explored within the study – prioritizing computationally efficient channel modeling over absolute fidelity. The research underscores that a slightly imperfect, yet predictably responsive, digital twin is far more valuable than a theoretically perfect model that introduces unacceptable latency, ultimately hindering real-time application performance. The focus remains on establishing logical completeness within the predictive framework.
What’s Next?
The pursuit of predictive fidelity in Network Digital Twins, as demonstrated by this work, inevitably encounters the limitations of approximation. While ray tracing offers a path towards realistic channel modeling, the computational cost remains a significant barrier to true real-time operation. The trade-offs highlighted here are not merely engineering challenges; they represent a fundamental tension between mathematical completeness and practical realization. Future work must move beyond simply increasing the resolution of simulations and instead focus on developing provably accurate, yet computationally efficient, approximations of the wireless channel.
A critical, and often overlooked, aspect is the inherent unpredictability of mobility itself. Models, no matter how sophisticated, are built upon assumptions about future behavior. The challenge lies not just in predicting signal propagation, but in rigorously quantifying the uncertainty in mobility predictions and propagating that uncertainty through the entire simulation. A purely empirical approach-fitting models to observed data-will always fall short. Only a mathematically grounded understanding of driver behavior, perhaps leveraging techniques from game theory or optimal control, offers a path toward robust prediction.
In the chaos of data, only mathematical discipline endures. The current emphasis on ‘big data’ and machine learning risks obscuring the underlying physics. While these tools may offer short-term gains in prediction accuracy, they lack the explanatory power and generalizability of a truly first-principles approach. The future of Network Digital Twins lies not in more data, but in more elegant and provable algorithms.
Original article: https://arxiv.org/pdf/2601.16559.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- United Airlines can now kick passengers off flights and ban them for not using headphones
- Katanire’s Yae Miko Cosplay: Genshin Impact Masterpiece
- All Itzaland Animal Locations in Infinity Nikki
- How to Complete Bloom of Tranquility Challenge in Infinity Nikki
- How to Get to the Undercoast in Esoteric Ebb
- Gold Rate Forecast
- All Golden Ball Locations in Yakuza Kiwami 3 & Dark Ties
- A Dark Scream Theory Rewrites the Only Movie to Break the 2-Killer Rule
- BloxStrike codes (March 2026)
- Fire Force Season 3 Part 2 Episode 24 Release Date, Time, Where to Watch
2026-01-27 01:05