Author: Denis Avetisyan
A new computational approach offers a faster and more precise method for determining the stable states of mechanical systems under unpredictable external influences.
This review details an algorithm for efficiently computing generalized steady states in non-autonomous, nonlinear mechanical systems subjected to arbitrary aperiodic forcing.
Establishing reliable dynamics for systems under arbitrary, time-dependent forcing remains a significant challenge in nonlinear mechanics. This is addressed in ‘Predicting Generalized Steady States in Aperiodically Forced Mechanical Systems’, which introduces a novel computational algorithm for efficiently determining generalized steady states (GSS) in nonlinear mechanical systems. The method delivers accurate, refinable approximations of these states without requiring lengthy convergence periods, outperforming both traditional numerical integration and data-driven approaches when the system’s linear characteristics are known. Could this framework unlock more efficient and robust design strategies for complex, dynamically loaded structures?
Unveiling Dynamic Systems: The Challenge of Forced Oscillations
A vast array of engineering systems, from the subtle vibrations of aircraft wings to the powerful oscillations within power grids, are routinely subjected to external forces. Accurately predicting their long-term behavior under such forcing isn’t merely a matter of calculating initial responses; it demands a comprehensive understanding of how the system evolves over time. These systems often exhibit intricate dynamics, influenced by factors like friction, material properties, and geometric complexities, which contribute to responses far beyond simple, predictable patterns. Consequently, engineers require sophisticated modeling and analytical techniques to not only ensure stability but also to optimize performance and prevent catastrophic failures – particularly when dealing with sustained or cyclic loading that can reveal hidden vulnerabilities and drive systems towards unexpected states. The ability to forecast these complex, time-dependent behaviors is therefore paramount in the design, control, and maintenance of countless critical infrastructures.
Conventional analytical techniques often fall short when predicting the long-term behavior of systems subjected to continuous external forces, especially those exhibiting nonlinearity and complex damping. These methods frequently rely on simplifying assumptions – such as linear behavior or proportional damping – that break down when faced with real-world complexities. Nonlinear systems, by their very nature, can exhibit phenomena like frequency mixing, harmonic generation, and amplitude-dependent damping, all of which are poorly represented by linear approximations. Furthermore, intricate damping mechanisms – those beyond simple viscous friction – introduce energy dissipation patterns that are difficult to model accurately. This limitation hinders precise predictions of sustained oscillations, stability analysis, and ultimately, the reliable design of engineered systems operating under forced conditions, necessitating advanced computational and experimental approaches to fully characterize dynamic responses.
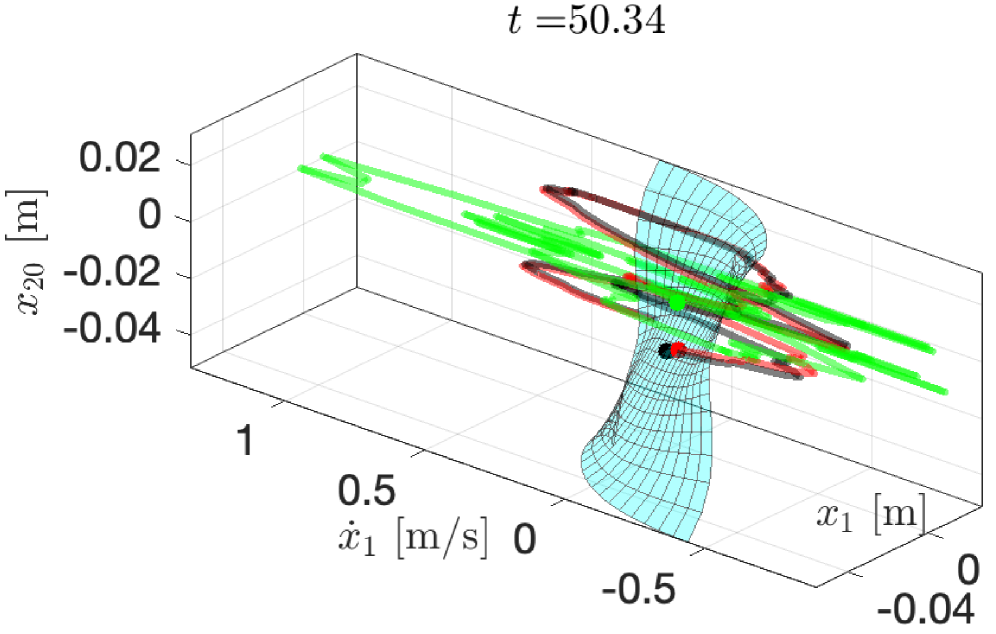
The long-term behavior of forced systems often extends far beyond initial, transient responses, settling into a complex, repeating pattern known as the Generalized Steady State (GSS). Identifying this GSS is paramount for accurate prediction of system performance and stability, yet it presents a significant analytical challenge. Unlike traditional steady-state analysis which assumes a simple, unchanging equilibrium, the GSS acknowledges that many systems, particularly nonlinear ones, exhibit a dynamic equilibrium – a continuous, bounded oscillation or repeating sequence. Characterizing the GSS requires moving beyond simple frequency-domain analysis and embracing methods capable of capturing the full temporal evolution of the system’s response, often involving techniques from nonlinear dynamics and time-series analysis. The accurate determination of the GSS is therefore not merely a matter of finding a fixed point, but of mapping the entire attractor in the system’s state space, offering a complete picture of its sustained, forced behavior.
GSSTool: A Framework for Discovering System Stability
GSSTool is a computational algorithm developed to identify Globally Stable Solutions (GSSs) within complex, nonlinear mechanical systems. The algorithm is designed to overcome the computational expense associated with directly simulating these systems, which often exhibit multiple stable and unstable states. By efficiently locating GSSs, GSSTool facilitates the analysis of system behavior under varying conditions and provides a means to predict the most likely stable configuration. The tool is applicable to a broad range of mechanical systems where nonlinearities significantly influence stability and response, and it offers a substantial reduction in computation time compared to traditional full-model simulations.
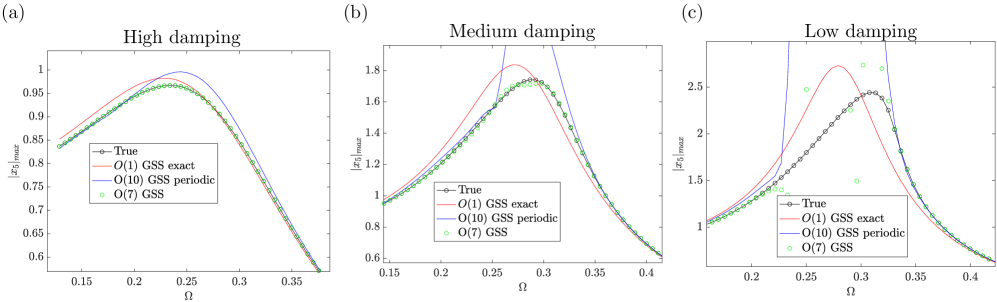
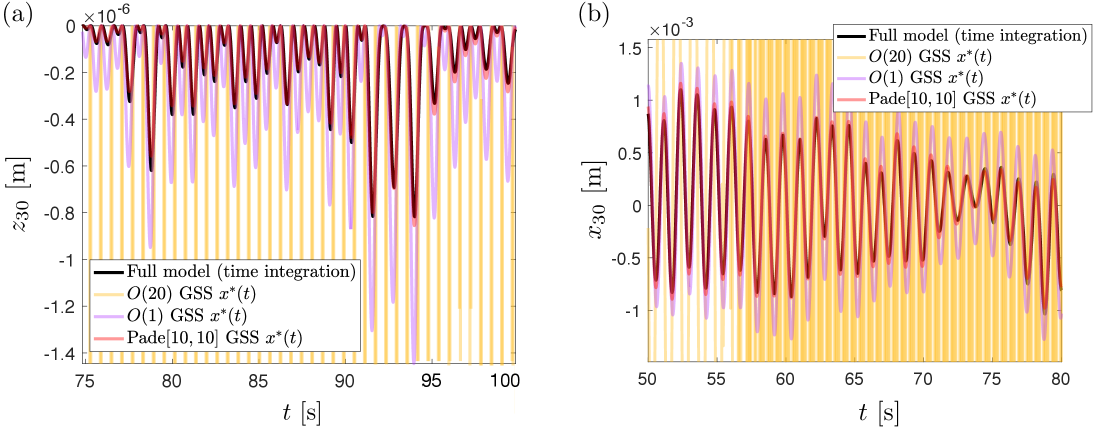
GSSTool utilizes asymptotic methods, specifically Taylor Expansion and Pade Approximation, to mathematically characterize the relationship between a system’s Global Stability Skeleton (GSS) and the amplitude of external forcing. Taylor Expansion provides a polynomial representation of the GSS as a function of forcing amplitude, while Pade Approximation refines this representation by expressing the GSS as a ratio of two polynomials. This approach allows for efficient calculation of the GSS across a range of forcing amplitudes without requiring repeated full simulations of the nonlinear system; the resulting function approximates the GSS behavior and enables rapid prediction of stability boundaries as forcing parameters change. The accuracy of these approximations is dependent on the order of the expansion and the specific characteristics of the nonlinear system.
GSSTool utilizes a Finite Element Model (FEM) to accurately define the geometry and material characteristics of the mechanical system under investigation, enabling realistic simulation conditions. This integration allows for the computation of GSSs based on the system’s physical properties as defined within the FEM. Critically, by employing asymptotic methods in conjunction with the FEM, GSSTool achieves a computational speedup of 3 to 50 times compared to performing full, time-consuming simulations of the entire nonlinear system. This efficiency gain is particularly valuable for complex systems where traditional simulation methods are prohibitively slow.
Revealing System Dynamics with Reduced-Order Modeling
GSSTool utilizes the Slow Subspace Manifold (SSM) as a reduced-order modeling technique to improve computational efficiency. The SSM identifies and retains only the dominant dynamic characteristics of a system, effectively decreasing the dimensionality of the state space. This approach allows for simulations and analyses to be performed with significantly fewer computational resources compared to full-order models, without substantial loss of accuracy in representing the system’s primary behavior. The resulting model focuses on the slowest, most impactful modes, discarding rapidly decaying or negligible components to streamline calculations.
The SSMLearn algorithm determines the Slow Subspace Manifold (SSM) by characterizing system responses to a diverse set of input forcing signals. This process involves repeatedly exciting the system with different inputs and observing the resulting state-space trajectories. SSMLearn then employs techniques, such as singular value decomposition, to identify the lower-dimensional subspace – the SSM – that captures the most significant portions of these observed trajectories. The algorithm prioritizes directions in the state space with the largest energy content across the varying forcing signals, effectively isolating the dominant dynamic modes and allowing for dimensionality reduction without substantial loss of fidelity.
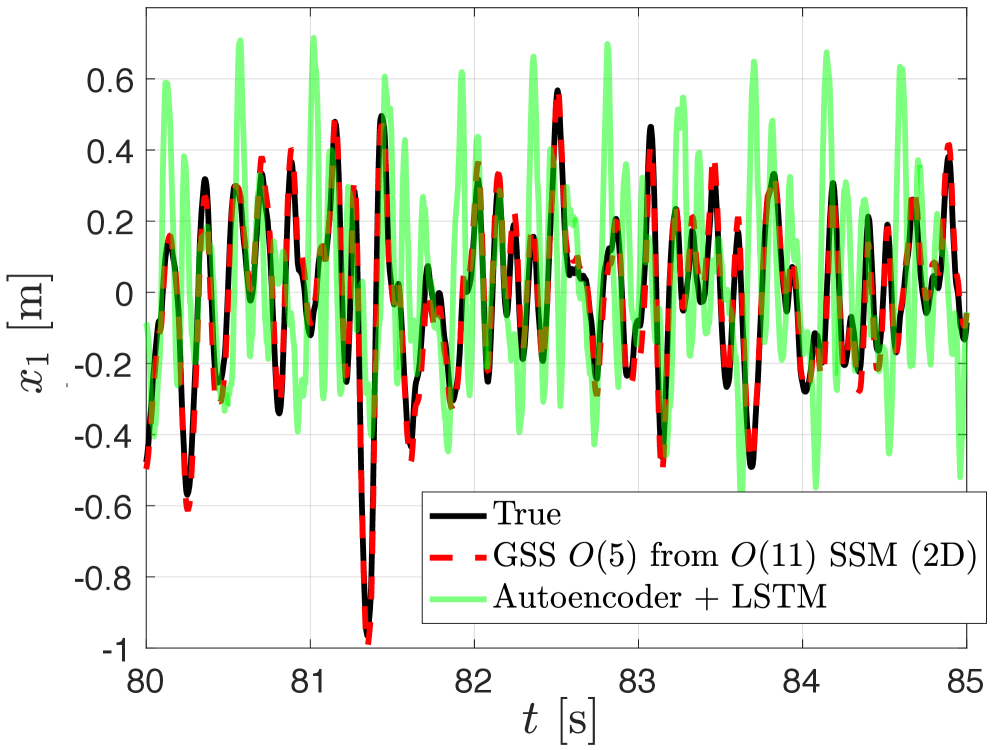
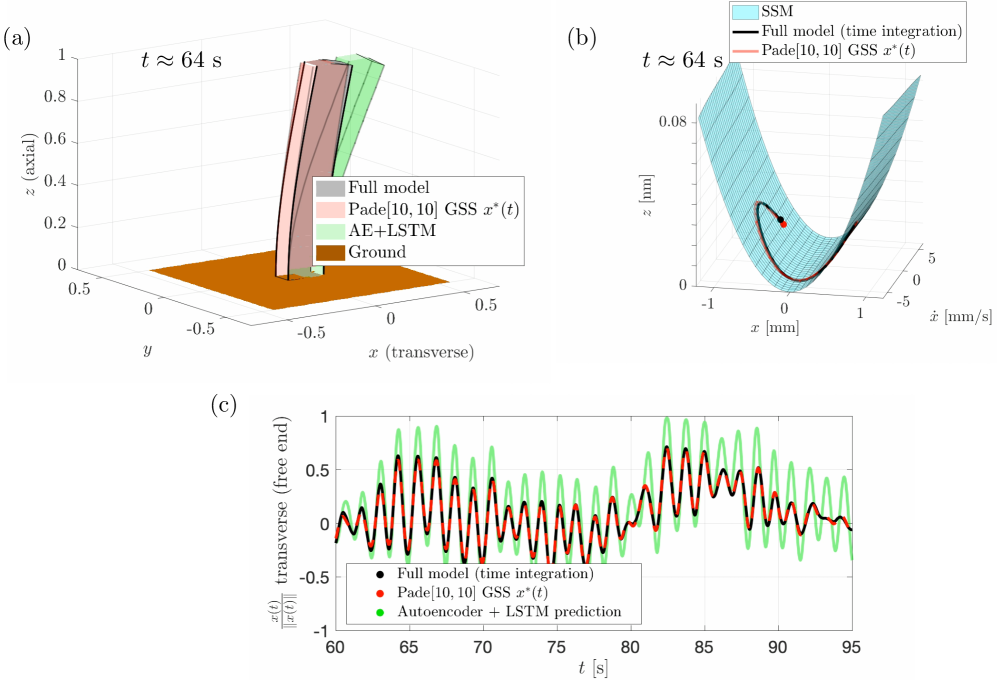
Projection onto the Slow Subspace Manifold (SSM) enables substantial computational efficiency gains by reducing the dimensionality of the system representation while preserving key dynamic behaviors. Implementation of an ExponentialKernel within the SSMLearn algorithm further optimizes this reduction, resulting in empirically observed performance improvements of 25x faster training and 50x faster testing when benchmarked against Autoencoder+LSTM models. This acceleration is achieved by focusing computational resources on the dominant modes of system behavior as defined by the SSM, effectively discarding less significant high-dimensional components without compromising the accuracy of dynamic predictions.
Data-Driven Refinement: Enhancing Predictive Power
GSSTool enhances the precision and reliability of system analysis through the integration of AutoencoderLSTM networks, a form of deep learning. These networks are trained directly on experimental data, enabling the tool to learn and predict system behavior beyond the constraints of traditional physics-based models. This data-driven component effectively addresses unmodeled complexities and nuances within dynamic systems that might otherwise introduce errors or inaccuracies. By leveraging the predictive capabilities of AutoencoderLSTMs, GSSTool achieves a more robust and adaptable framework for analyzing a wide range of systems, particularly those where complete physical understanding is limited or difficult to obtain. This allows for increased confidence in simulations and predictions, even in challenging scenarios.
The system leverages a deep learning model-an AutoencoderLSTM network-to enhance the accuracy of its dynamic system representations. This network isn’t simply applying pre-programmed rules; it actively learns from experimental data, identifying patterns and nuances in system behavior that traditional physics-based models might overlook. By analyzing real-world observations, the AutoencoderLSTM refines the underlying GSS representation, effectively accounting for unmodeled complexities-those subtle interactions or external factors not explicitly included in the initial model. This data-driven refinement allows for a more robust and adaptable system, capable of accurately predicting behavior even when faced with conditions or variables not fully captured by theoretical frameworks, and ultimately delivering more reliable results.
GSSTool establishes a robust analytical framework by strategically merging the strengths of physics-based modeling with data-driven learning techniques. This hybrid approach leverages the NewmarkMethod for precise time integration within the system’s dynamic analysis, while an AutoencoderLSTM network refines the model’s understanding of complex behaviors not explicitly captured by traditional physics-based methods. Notably, this integration achieves high fidelity results utilizing a remarkably compact 2D State Space Model (SSM); a significant advancement considering that purely data-driven methodologies typically require latent spaces of six to nine dimensions to achieve comparable accuracy. This efficiency not only reduces computational demands but also enhances the interpretability of the learned system representation, providing a powerful and versatile tool for analyzing a broad range of dynamic systems.
The pursuit of generalized steady states, as detailed in this work, demands a careful consideration of system boundaries and the potential for unseen influences. This aligns with Max Planck’s observation: “An appeal to the authority of a great man is no substitute for proof.” The algorithm presented here offers a means of ‘proof’ by efficiently mapping these states, but it’s crucial to acknowledge the inherent limitations of any computational model. The accuracy of predicting these states relies heavily on the completeness of the system’s representation; what forces, however subtle, might be omitted? Addressing these unseen factors, and quantifying their potential impact, remains a core challenge in nonlinear dynamics, much like seeking complete evidence in any scientific endeavor. The speed improvements offered by the algorithm provide a powerful tool, but only when coupled with a rigorous assessment of its boundaries and potential for error.
Beyond the Steady State
The capacity to efficiently map generalized steady states-those alluring attractors in a sea of forced vibration-offers a tempting promise: predictive control of decidedly unpredictable systems. However, a careful examination of the algorithm reveals an inherent dependence on numerical precision. Researchers should diligently check data boundaries to avoid spurious patterns; a seeming stability might simply be an artifact of finite resolution. The question isn’t merely finding these states, but establishing confidence in their genuine existence.
Future work must address the limitations imposed by model reduction. While streamlining calculations is essential, it also introduces approximations. A particularly fruitful avenue lies in systematically quantifying the error introduced by these reductions – understanding how much simplification a system can tolerate before losing essential characteristics. One wonders if the very concept of a ‘generalized’ steady state isn’t itself a simplification, an attempt to impose order on fundamentally chaotic behavior.
Ultimately, the true challenge lies not in predicting these states, but in interpreting them. A steady state, after all, is merely a point in phase space. The real work is discerning whether that point represents a robust, meaningful configuration, or a transient illusion – a fleeting moment of calm before the inevitable return to complexity. The algorithm provides a map; it remains for the investigator to chart the territory.
Original article: https://arxiv.org/pdf/2602.16848.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- United Airlines can now kick passengers off flights and ban them for not using headphones
- Crimson Desert: Disconnected Truth Puzzle Guide
- All 9 Coalition Heroes In Invincible Season 4 & Their Powers
- How to Get to the Undercoast in Esoteric Ebb
- All Golden Ball Locations in Yakuza Kiwami 3 & Dark Ties
- Warframe Voruna Prime access begins on April 8 for all platforms, new deluxe cosmetic Warframe skins revealed
- Grey’s Anatomy Season 23 Confirmed for 2026-2027 Broadcast Season
- All Itzaland Animal Locations in Infinity Nikki
- Mewgenics vinyl limited editions now available to pre-order
- Katanire’s Yae Miko Cosplay: Genshin Impact Masterpiece
2026-02-22 18:16