Author: Denis Avetisyan
A new system leverages semantic understanding of surroundings to enable aerial robots to proactively avoid hazards and navigate complex, unpredictable environments.
This review details RA-Nav, a risk-aware navigation framework using semantic segmentation for improved obstacle avoidance and path planning in dynamic aerial robotics applications.
Existing aerial robot navigation systems struggle to adapt when static obstacles unexpectedly become dynamic, creating critical safety limitations. This paper introduces ‘RA-Nav: A Risk-Aware Navigation System Based on Semantic Segmentation for Aerial Robots in Unpredictable Environments’, a novel framework leveraging real-time semantic segmentation to classify obstacles and predict potential risks in dynamic environments. By constructing a local risk map and employing a risk-informed path search algorithm, RA-Nav demonstrably improves navigation success rates in challenging scenarios. Could this approach pave the way for more robust and reliable autonomous flight in increasingly complex real-world environments?
The Imperative of Adaptability: Navigating Dynamic Environments
Aerial robotics ventures into real-world scenarios present substantial difficulties due to the prevalence of unpredictable obstacles. Unlike controlled laboratory settings, complex environments – such as warehouses, disaster zones, or forests – are rarely static; objects and people move unexpectedly, creating a constantly shifting landscape for navigation. This dynamism poses a significant challenge to traditional path-planning algorithms, which typically rely on pre-mapped, unchanging surroundings. The inability to anticipate and react to unforeseen obstructions can lead to collisions, mission failure, or even damage to the robot itself. Consequently, developing robust navigation strategies capable of handling this inherent uncertainty is paramount for deploying aerial robots effectively in these demanding conditions, necessitating systems that prioritize real-time sensing, rapid decision-making, and adaptable flight paths.
Conventional path planning algorithms, while effective in static environments, often falter when confronted with the unpredictability of real-world scenarios. These methods typically rely on pre-defined maps and calculated trajectories, proving inadequate when obstacles move or appear unexpectedly. The core issue lies in their limited capacity for reactive adaptation – the ability to reassess and modify a planned path in real-time based on changing conditions. Consequently, a robot employing such techniques may find itself unable to avoid collisions or efficiently navigate dynamic spaces, necessitating more sophisticated approaches capable of handling unforeseen circumstances and demanding immediate adjustments to ensure safe and effective operation.
Effective navigation in unpredictable environments hinges on a system’s ability to not only perceive potential hazards, but also to proactively assess and mitigate associated risks through adaptable planning. This necessitates a shift from pre-defined routes to strategies that continuously evaluate and adjust to changing conditions – a capability demonstrated by a newly developed framework. Rigorous testing within complex simulated environments reveals a substantial 95% success rate in completing navigational tasks, even amidst unforeseen obstacles and dynamic disturbances. This high level of performance underscores the importance of robust risk assessment and reactive planning for aerial robots operating in real-world scenarios where complete predictability is rarely, if ever, achievable.
Constructing a Predictive Landscape: Semantic Understanding and Risk Fields
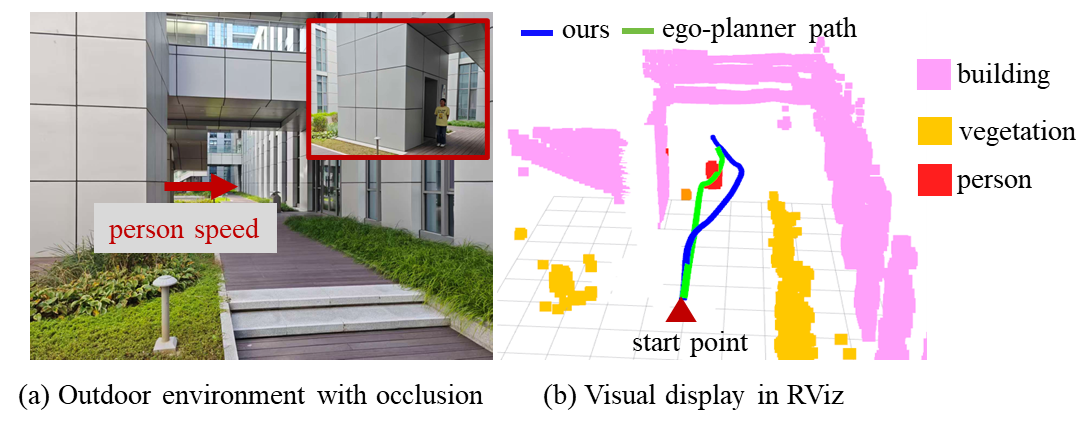
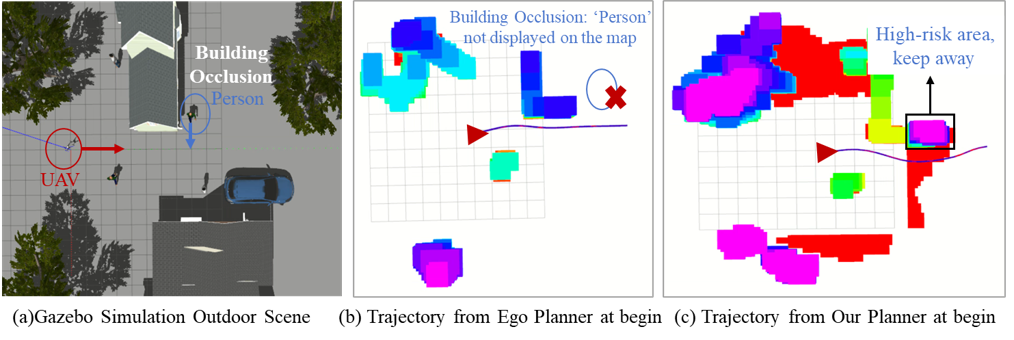
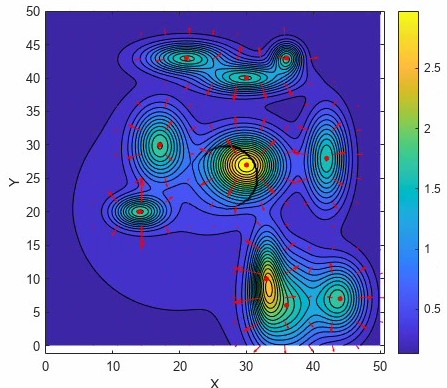
The system constructs a ‘Risk Field’ as a spatial representation of potential hazards within an environment. This field is not simply a geometric map of obstacles; it is fundamentally informed by semantic understanding of those obstacles. By identifying what an object is – differentiating, for example, between a static wall, a moving vehicle, and a pedestrian – the system can assign appropriate risk values to specific locations within the field. This semantic awareness allows for a more nuanced and accurate assessment of potential hazards compared to systems relying solely on geometric data, enabling more effective path planning and collision avoidance. The Risk Field serves as the foundational layer for downstream decision-making processes related to safety and navigation.
Semantic segmentation is a critical component of environmental understanding, enabling the identification and classification of objects within a sensor’s field of view. Utilizing the lightweight LMSCNet architecture, our system achieves a mean Intersection over Union (mIoU) of 17.01% in labeling environmental elements and distinguishing obstacle types. This performance currently ranks first among comparable methods tested, indicating superior accuracy in pixel-level classification. The mIoU metric assesses the overlap between predicted and ground truth segmentations; a higher score signifies a more precise delineation of objects within the scene, directly improving the reliability of subsequent risk assessment processes.
The system constructs a ‘Risk Field’ by representing static obstacles using a Gaussian distribution, allowing for probabilistic spatial reasoning about hazard proximity. This field is not static; it dynamically incorporates information regarding moving obstacles to update the risk assessment in real-time. Performance evaluations demonstrate the efficacy of this dynamic adjustment, achieving an Intersection over Union (IoU) of 58.76% in identifying and classifying obstacles, representing a 4.74% improvement over the SCPNet method. This indicates a more accurate and reliable assessment of the operational environment, particularly in scenarios with dynamic elements.
From Perception to Action: Risk-Aware Path Planning
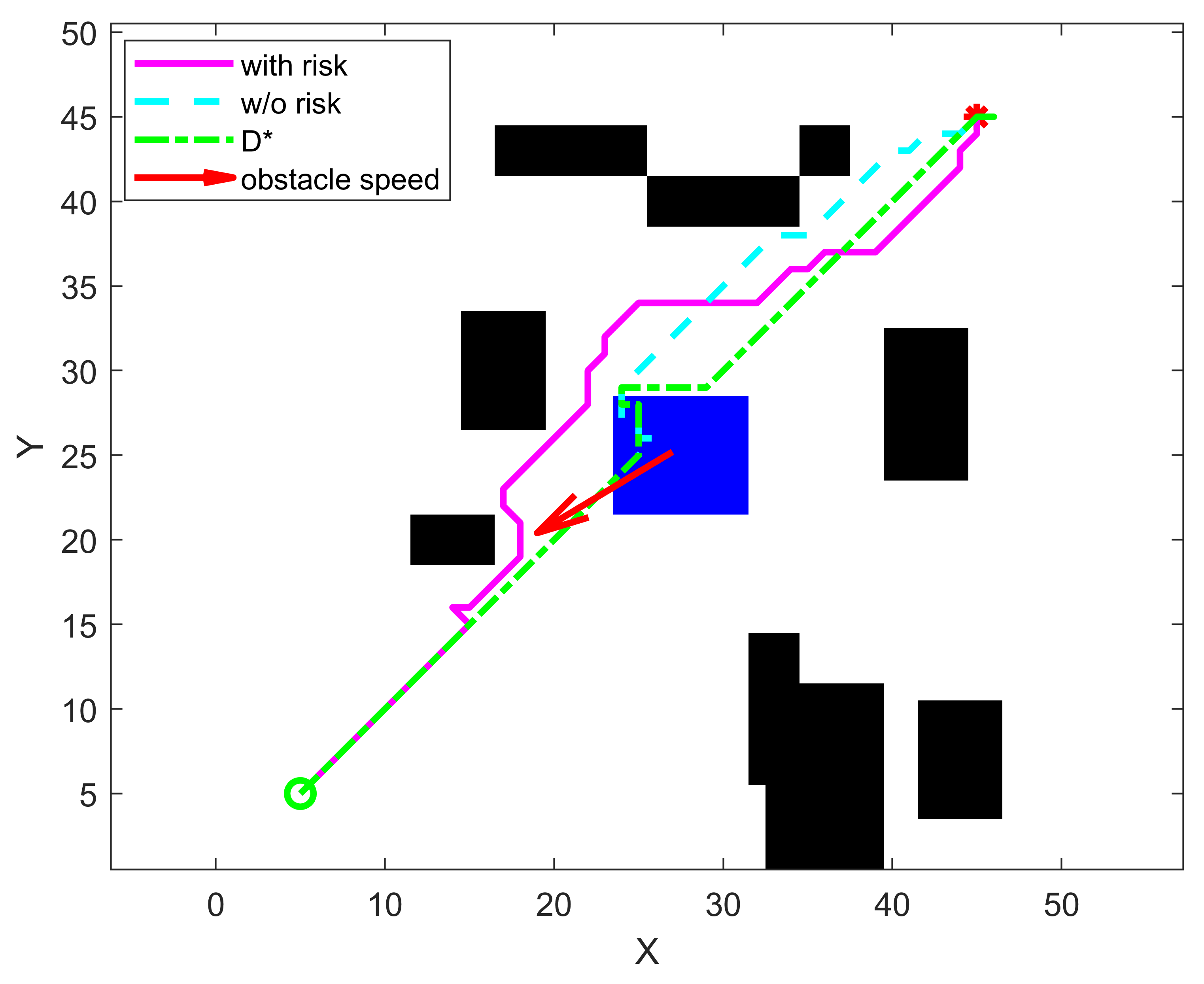
The R-A Path Search algorithm utilized for path planning operates by directly incorporating the constructed Risk Field into its cost function. This integration allows the algorithm to evaluate potential paths not solely on distance or travel time, but also on the cumulative risk exposure along the route. The ‘A’ component provides informed search capabilities, leveraging a heuristic to prioritize exploration of promising paths, while the ‘R’ component modifies the traditional cost calculation to penalize movement through high-risk areas as defined by the Risk Field. Consequently, the algorithm identifies paths that minimize both distance and risk, effectively balancing efficiency with safety considerations during the planning process.
Prioritizing routes with minimal risk exposure represents a significant advancement over traditional path planning methods, which often focus solely on shortest distance or minimal travel time. This risk-aware approach directly integrates potential hazards into the path cost function, resulting in trajectories that actively avoid areas identified as dangerous. Consequently, the system demonstrates improved safety by reducing the probability of collisions or near-miss events, and achieves greater efficiency through proactive avoidance of obstacles and dynamically hazardous zones, minimizing the need for reactive adjustments or emergency maneuvers during execution.
The path planning algorithm utilizes a detailed Semantic Map to categorize traversable space, enabling differentiation between safe and unsafe areas based on object recognition and environmental characteristics. This map is dynamically updated to account for moving obstacles through a Velocity-Dependent Risk Model, which assesses the potential for collision based on the relative velocities of the robot and detected objects. Integration of this model allows the algorithm to predict future collision risks and adjust planned paths accordingly, resulting in a documented 95% success rate for navigation in unpredictable environments during testing.
The Culmination of Precision: Optimizing Flight Paths and Real-World Performance
The system’s ability to navigate efficiently hinges on trajectory optimization, a process that moves beyond a simple initial path to discover the most effective route. Utilizing B-Spline curves, this optimization doesn’t just aim for the shortest distance, but carefully sculpts a path that minimizes both travel time and energy expenditure. These curves offer a flexible and smooth representation of the flight path, allowing for nuanced adjustments that account for the robot’s dynamics and the surrounding environment. By iteratively refining the curve’s control points, the system effectively ‘learns’ the optimal trajectory, reducing unnecessary maneuvers and conserving valuable resources – a crucial step towards prolonged and autonomous operation for aerial robotics.
The system’s ability to navigate complex environments hinges on its integration of a Semantic Map, which provides a detailed understanding of the surroundings beyond simple obstacle detection. This map isn’t merely a geometric representation; it classifies areas as navigable space, obstacles, or even specific features like trees or buildings. During trajectory optimization – the process of finding the quickest and most efficient flight path – this semantic information is crucial. The system actively considers these environmental constraints, ensuring the planned path doesn’t violate boundaries or risk collision. Consequently, the aerial robot doesn’t just react to obstacles; it proactively avoids them by factoring their presence and characteristics into the path planning stage, resulting in smoother, safer, and more efficient flight.
The culmination of trajectory optimization and semantic mapping reveals a system capable of navigating complex environments with remarkable efficiency and resilience. Testing demonstrates robust performance not only in static scenarios, but also within continuously changing dynamic spaces, a critical capability for real-world application. Notably, the integrated system achieves speeds thirteen times greater than those of the SCPNet baseline, representing a significant leap forward in aerial robotics. This enhanced velocity, combined with the system’s ability to proactively avoid obstacles and adapt to unforeseen changes, suggests a pathway towards safer, more reliable, and ultimately more versatile autonomous aerial vehicles capable of operating effectively in challenging conditions.
The pursuit of robust aerial navigation, as detailed in this research, echoes a fundamental tenet of mathematical rigor. The system’s reliance on semantic segmentation for hazard prediction and subsequent risk-aware path planning isn’t merely about achieving functional obstacle avoidance; it’s about establishing a provably safe operational domain. As David Hilbert famously stated, “We must be able to answer the question: what are the ultimate foundations of mathematics?” This mirrors the core concept of the paper – creating a navigation framework built on demonstrable principles of risk assessment rather than empirical testing. The emphasis on predictable behavior in unpredictable environments exemplifies a commitment to mathematical purity in algorithmic design.
Beyond the Horizon
The presented framework, while demonstrably improving navigation in unpredictable environments, rests upon a foundation that, like all practical systems, invites further scrutiny. The semantic segmentation, the very lens through which the robot perceives risk, is inherently limited by the training data. A novel hazard, unseen during training, will not be ‘understood’ – the system will react, not comprehend. True robustness demands a shift from pattern recognition to a formal, provable understanding of hazard geometry and dynamics. Simply achieving high accuracy on test sets is insufficient; a formal verification of safety guarantees remains elusive.
Future work must address the limitations of relying solely on learned representations. The integration of formal methods – perhaps predicate logic combined with reachability analysis – could provide a rigorous framework for specifying and verifying safety constraints. Furthermore, the current emphasis on reactive avoidance obscures the potential for predictive risk mitigation. A system capable of anticipating hazard evolution, rather than merely responding to its presence, would represent a significant advancement.
Ultimately, the pursuit of truly autonomous navigation requires a departure from the empirical. The elegance of a solution is not measured by its performance on a benchmark, but by the certainty with which its correctness can be established. Until algorithms are demonstrably safe, rather than merely ‘good enough’, the dream of fully autonomous flight will remain, regrettably, grounded in approximation.
Original article: https://arxiv.org/pdf/2602.17515.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Netflix’s Little House On The Prairie Reboot: Release Date, Cast & Everything We Know
- Off Campus Season 1 Soundtrack Guide
- YouTuber arrested after viral AI bodycam videos spark real police complaints
- Silver Rate Forecast
- Prime Video’s New R-Rated Spy Thriller Is Officially No.1 On Streaming Despite Poor Reviews
- Brent Oil Forecast
- Gold Rate Forecast
- EUR ZAR PREDICTION
- Bulgakov’s Take: Koreans Bet the Farm on Chips, Crypto, and Chaos
- Peaky Blinders: The Immortal Man’s Tommy Shelby Is a Better Father Than Michael Corleone
2026-02-21 15:35