Author: Denis Avetisyan
A new framework explicitly models how disruptions like accidents impact traffic flow, leading to significantly improved predictions.
This work introduces IGSTGNN, a graph neural network approach that integrates incident detection and impact modeling for enhanced spatiotemporal traffic forecasting.
While deep learning has advanced spatiotemporal traffic forecasting, current methods often overlook the disruptive influence of real-world incidents like accidents and adverse weather. This paper, ‘Incident-Guided Spatiotemporal Traffic Forecasting’, addresses this limitation by introducing a novel framework, IGSTGNN, which explicitly models the spatial and temporal impact of incidents on traffic flow using graph neural networks. By capturing both the initial heterogeneous spatial effects and the subsequent dynamic dissipation of incident-related disruptions, IGSTGNN achieves state-of-the-art performance on a newly constructed, large-scale dataset. Could this incident-aware approach unlock more robust and accurate traffic prediction, ultimately leading to smarter and more responsive transportation systems?
The Imperative of Accurate Traffic Forecasting
The ability to accurately forecast traffic conditions is foundational to modern urban life, extending far beyond simply informing commuters. Effective traffic prediction directly supports critical infrastructure planning, allowing city planners to optimize road networks, strategically allocate resources for public transportation, and design more efficient emergency response systems. Furthermore, advancements in this area are integral to the development of intelligent transportation systems, paving the way for autonomous vehicles and ultimately reducing congestion, fuel consumption, and the associated environmental impact. Beyond convenience, reliable traffic forecasting contributes significantly to economic productivity by minimizing delays in the movement of goods and people, and enhancing overall quality of life within increasingly complex urban environments.
Conventional traffic prediction models frequently falter due to the intricate web of dependencies governing vehicular movement. These systems historically prioritized aggregated data – average speeds, traffic density – overlooking the nuanced interactions between individual vehicles, driver behaviors, and external influences. The reality is that traffic isn’t a smoothly flowing river, but a complex system exhibiting emergent properties; a single incident, like a stalled vehicle or a sudden lane change, can propagate disruptions far beyond its immediate location. Furthermore, factors such as weather conditions, special events, and even social media reports contribute to non-linear changes in flow, making it exceptionally difficult for static or overly simplified models to accurately capture the complete picture. Consequently, traditional approaches often struggle with the inherent volatility and unpredictability characterizing modern traffic networks, necessitating the development of more adaptive and sophisticated forecasting techniques.
Traffic prediction isn’t simply about identifying recurring rush hours; it demands a nuanced understanding of both predictable trends and the inevitable disruptions that challenge them. While models can establish baseline expectations based on time of day, day of the week, and seasonal variations, truly accurate forecasting requires accounting for stochastic events – accidents, sudden weather changes, or even large public gatherings. These unpredictable incidents introduce variability that historical data alone cannot resolve. Consequently, sophisticated approaches integrate real-time information with pattern recognition, aiming to discern how these external factors deviate from established norms and influence traffic dynamics. The ability to model this interplay between inherent patterns and unforeseen circumstances is fundamental to building robust and reliable traffic prediction systems, moving beyond simple extrapolation to proactive anticipation.
Predictive models built solely on past traffic patterns are increasingly inadequate in modern transportation systems. While historical data establishes a baseline understanding of typical congestion, it fails to capture the influence of unforeseen incidents – accidents, construction, even major events – that dramatically alter traffic flow. Consequently, contemporary research emphasizes the integration of real-time data streams – from sensors, cameras, and mobile devices – to dynamically adjust predictions. These adaptive models can detect anomalies, assess their impact, and recalibrate forecasts, offering a more resilient and accurate depiction of current conditions. The ability to respond to disturbances, rather than simply extrapolate from the past, is proving essential for effective traffic management and optimized route guidance.
Spatio-Temporal Dependencies: The Logical Foundation of Flow
Traffic flow is not a series of isolated events but rather a continuous process fundamentally influenced by both where vehicles are located and when events occur. The movement of a vehicle at a specific location is directly correlated to the conditions at adjacent locations – congestion in one area predictably affects traffic upstream and downstream. Simultaneously, traffic patterns exhibit strong temporal dependencies; peak hour congestion, daily fluctuations, and even recurring weekly patterns demonstrably impact flow rates. These interdependencies mean that current traffic conditions at a location are heavily influenced by past conditions at that and nearby locations, and future conditions are predictable based on these historical and present states. Ignoring either spatial or temporal relationships results in inaccurate modeling and ineffective traffic management strategies.
Accurate traffic modeling necessitates the consideration of spatio-temporal dependencies because traffic conditions at one location and time directly influence conditions at neighboring locations and future times. Ignoring these relationships leads to significant inaccuracies in prediction; for instance, congestion originating from an incident will propagate through the network, affecting travel times on connected roadways. Models that fail to account for this propagation – such as those treating each road segment as independent – consistently underperform compared to those incorporating historical and real-time data reflecting how disturbances evolve both spatially and temporally. Consequently, capturing these dependencies is not merely a refinement, but a foundational requirement for reliable traffic forecasting and effective traffic management strategies.
Spatio-temporal data for traffic analysis is primarily sourced from a variety of sensor technologies, including inductive loop detectors, radar, cameras, and increasingly, connected vehicle data. These sensors collect data points that include vehicle count, speed, occupancy, and travel time, each inherently linked to a specific geographic location and timestamp. The resulting datasets are multi-dimensional, requiring specialized data structures and algorithms for efficient storage and processing. Data is typically aggregated into intervals – for example, 5-minute counts per lane – to manage volume and facilitate analysis. The accuracy of traffic models is directly correlated with the density and quality of this spatio-temporal data, with higher resolution data enabling the capture of more nuanced traffic phenomena.
Graph neural networks (GNNs) offer a suitable framework for representing road networks due to their ability to process data structured as graphs, where nodes represent locations or intersections and edges represent road segments. Unlike traditional methods, GNNs can directly learn from the network’s topological structure and incorporate spatial relationships between these nodes. Furthermore, GNNs can model the temporal dynamics of traffic by incorporating time-series data as node or edge features, allowing the network to learn how traffic conditions evolve over time. This enables the prediction of traffic flow, speed, and congestion based on the interconnectedness of the road network and historical traffic patterns, surpassing the limitations of methods that treat road segments in isolation.
Modeling Incident Impact: A Modular Approach to Disruption
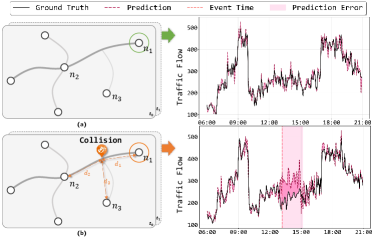
Non-recurrent incidents, encompassing events like vehicular accidents, construction, and special events, introduce stochastic disruptions to typical traffic patterns. Unlike predictable congestion arising from daily commutes, these incidents create localized bottlenecks and alter network-wide travel times in an unpredictable manner. Traditional traffic modeling approaches, often calibrated on historical average conditions, frequently fail to accurately forecast traffic states following such incidents. Consequently, specialized modeling techniques are required to capture the transient and spatially-variable effects of these disruptions, necessitating the consideration of incident characteristics – such as duration, location, and severity – to provide reliable short-term traffic predictions and inform effective traffic management strategies.
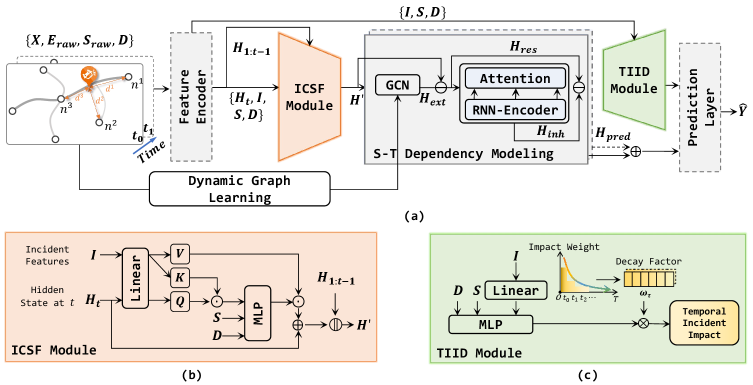
The IGSTGNN framework directly tackles the modeling of non-recurrent incident impacts on traffic flow through dedicated modular components. These modules are designed to represent the dynamic and spatially-varying effects incidents have on the road network. Specifically, the framework integrates the Temporal Incident Impact Decay (TIID) module to model the reduction of incident influence over time, and the Incident-Context Spatial Fusion (ICSF) module to capture the differing levels of impact across the road network based on incident location and surrounding context. This modular design allows for a more nuanced representation of incident effects compared to models that treat disruptions as uniform or static events.
The Temporal Incident Impact Decay (TIID) module within IGSTGNN models the reduction of incident-related traffic disruption as time progresses. This is achieved by representing the incident’s influence as a decaying function applied to node embeddings; specifically, a sigmoid function parameterized by a decay rate λ determines the strength of the incident’s impact at each subsequent time step t . The decay rate is learned during training, allowing the model to adapt to different incident types and network conditions. This time-dependent weighting ensures that the influence of an incident lessens realistically, reflecting the recovery of traffic flow after the initial disruption, and avoids artificially propagating effects indefinitely through the graph neural network.
The Incident-Context Spatial Fusion (ICSF) module within the IGSTGNN framework models the spatially varying impact of traffic incidents by considering both the incident’s location and the surrounding road network context. This is achieved through a graph convolutional network that aggregates feature information from neighboring road segments, weighted by their spatial proximity and connectivity. The module calculates a spatial impact map representing the degree to which each road segment’s speed and volume are affected by the incident, acknowledging that impact is typically strongest near the incident location and diminishes with distance, but is also shaped by road topology – for example, impacts propagate further along major arterial roads than minor local streets. The output of the ICSF module is a spatially-aware representation of incident influence, used to refine predictions of traffic conditions across the network.

Implications for Intelligent Infrastructure and Future Directions
The IGSTGNN framework demonstrably elevates the precision of traffic forecasting, with a particular strength in predicting disruptions caused by incidents. By leveraging a spatiotemporal graph neural network, the model effectively captures the complex relationships between road segments and anticipates how incidents propagate through the network. This enhanced accuracy isn’t merely incremental; it allows for more reliable short-term predictions, crucial for preemptive traffic management. Through rigorous testing on datasets like Alameda, IGSTGNN consistently reduced forecasting errors-up to a 5.65% decrease in Mean Absolute Error compared to current state-of-the-art methodologies-demonstrating its ability to provide actionable insights even amidst unforeseen events and contributing to the potential for smoother, more efficient urban mobility.
Enhanced traffic forecasting, as demonstrated by models like IGSTGNN, directly facilitates the implementation of proactive traffic management systems. Instead of reacting to congestion as it occurs, transportation authorities can leverage accurate predictions to preemptively adjust traffic flow. This includes dynamic rerouting of vehicles around anticipated incidents or bottlenecks, optimizing traffic signal timings to prevent queues, and implementing variable speed limits to maintain smoother traffic progression. Such strategies not only reduce congestion and travel times, but also improve fuel efficiency and lower emissions, contributing to a more sustainable and resilient transportation infrastructure. The ability to anticipate and mitigate traffic issues, rather than simply respond to them, represents a significant shift toward intelligent and adaptive traffic control.
Evaluations on the Alameda County dataset demonstrate that the IGSTGNN framework substantially enhances the precision of traffic predictions. Specifically, the model achieved a reduction in Mean Absolute Error – a key metric for forecasting accuracy – of up to 5.65% when contrasted with existing state-of-the-art methodologies. This improvement, while measured on a single dataset, suggests a tangible advancement in the ability to anticipate traffic flow, offering the potential for more effective traffic management and reduced congestion. The quantifiable reduction in MAE underscores IGSTGNN’s capacity to deliver more reliable forecasts, thereby supporting data-driven decision-making within intelligent transportation systems.
Rigorous evaluation demonstrates that the IGSTGNN framework consistently surpasses the predictive capabilities of existing state-of-the-art models across a diverse range of traffic datasets. Performance was quantified using Root Mean Squared Error RMSE, a standard metric for assessing forecasting accuracy, and consistently yielded lower values with IGSTGNN. This improvement wasn’t limited to specific conditions; the framework exhibited superior performance not only across different datasets representing varied traffic patterns and infrastructure, but also at all prediction horizons – meaning its accuracy remained consistently higher whether forecasting traffic a few minutes or a longer period into the future. This consistent and broad-based improvement in RMSE highlights the robustness and generalizability of IGSTGNN as a valuable tool for traffic state estimation and prediction.
A key component of the IGSTGNN framework, the Incident Context-aware Spatio-Temporal Graph Neural Network (ICSF) module, demonstrated exceptional performance in a comparative superiority study focused on prediction accuracy. Specifically, the ICSF module achieved the lowest Mean Absolute Percentage Error (MAPE) – a critical metric for evaluating forecasting precision – when compared against alternative approaches. This indicates a substantial improvement in the model’s ability to predict traffic patterns, particularly during disruptive events. The minimized MAPE suggests that the ICSF module’s integration of incident context into the spatio-temporal graph neural network effectively refines predictions, offering a more reliable basis for proactive traffic management and ultimately enhancing the efficiency of transportation systems.
The successful implementation of IGSTGNN extends beyond mere traffic prediction, offering a foundational element for comprehensive smart city infrastructure. Intelligent transportation systems, increasingly vital for urban sustainability and efficiency, rely on accurate, real-time data to optimize resource allocation and minimize disruption. This framework’s capacity to forecast traffic patterns, particularly during unforeseen incidents, directly supports proactive strategies like dynamic rerouting and congestion pricing, thereby reducing commute times and fuel consumption. Moreover, the principles underlying IGSTGNN – the integration of spatiotemporal graph neural networks and incident-aware contextualization – can be adapted to model other complex urban systems, including energy grids, public transit networks, and even pedestrian flow, ultimately contributing to a more responsive and resilient urban environment.
Continued development of the IGSTGNN framework anticipates a shift towards incorporating instantaneous data feeds, such as those from connected vehicles and roadside sensors, to refine predictive capabilities and respond to evolving traffic conditions with greater precision. Beyond data integration, researchers intend to explore advanced algorithms for incident detection, moving past reliance on historical patterns to leverage real-time anomaly detection and contextual understanding. This includes investigating the use of computer vision and natural language processing to interpret data from various sources – including social media and news reports – to verify and characterize incidents more rapidly and accurately, ultimately allowing for quicker implementation of effective traffic mitigation strategies and a more robust, adaptive intelligent transportation system.
The pursuit of accurate traffic forecasting, as detailed in this work, demands a fundamentally logical approach. The IGSTGNN framework embodies this principle by explicitly modeling incident impacts – a defined problem with a quantifiable effect on the system. This aligns perfectly with Alan Turing’s assertion: “The question of whether a machine can think is too ill-defined to have a meaningful answer.” Similarly, imprecise traffic models, lacking formal incident representation, offer only noise, not genuine prediction. The framework’s emphasis on graph neural networks and spatiotemporal analysis reflects a dedication to provable relationships within the traffic system, mirroring a commitment to mathematical purity in algorithmic design.
What’s Next?
The pursuit of accurate spatiotemporal forecasting, as exemplified by frameworks like IGSTGNN, continually bumps against the irreducible complexity of real-world systems. While the explicit modeling of incident impact represents a logical refinement, it is but one layer of abstraction atop a fundamentally chaotic process. The elegance of a graph neural network lies in its topology, yet topology alone cannot conjure data where none meaningfully exists – or compensate for the inherent uncertainty in human behavior. Future work must grapple not merely with how incidents propagate, but with the limitations of predicting truly novel events.
A critical, and often overlooked, issue is the verification of these models. Benchmarking against observed traffic patterns, while necessary, provides only a superficial validation. A truly robust system demands provable guarantees – demonstrable bounds on error, or a formal specification of conditions under which the forecast will remain reliable. The field seems content with incremental improvements in RMSE; a more ambitious path would involve establishing the mathematical limits of predictability itself.
Ultimately, in the chaos of data, only mathematical discipline endures. The next generation of spatiotemporal forecasting will not be defined by increasingly complex architectures, but by a renewed focus on fundamental principles – information theory, dynamical systems, and the rigorous quantification of uncertainty. The goal should not be to chase accuracy, but to define the boundaries of what is predictably knowable.
Original article: https://arxiv.org/pdf/2602.02528.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Netflix’s Little House On The Prairie Reboot: Release Date, Cast & Everything We Know
- Off Campus Season 1 Soundtrack Guide
- Silver Rate Forecast
- Infinity Nikki Candlelight Reverie Challenge and Rewards Guide
- Brent Oil Forecast
- Prime Video’s New R-Rated Spy Thriller Is Officially No.1 On Streaming Despite Poor Reviews
- Gold Rate Forecast
- EUR ZAR PREDICTION
- Tennis pro begs umpire for bathroom break to avoid “sh*tting on court”
- Amazon Primes new GenAI cartoon looks like K-Pop Demon Hunters with aliens
2026-02-04 10:55