Author: Denis Avetisyan
A new approach combining agentic artificial intelligence and edge computing is enabling more scalable and resilient autonomous operation for drone swarms.
This review details the integration of agentic AI and edge computing for autonomous UAV swarms, exemplified by a wildfire search-and-rescue application.
While deploying increasingly intelligent unmanned aerial vehicle (UAV) swarms promises transformative capabilities, limitations in infrastructure and computational resources hinder real-world application in dynamic, high-risk scenarios. This paper, ‘Agentic AI Meets Edge Computing in Autonomous UAV Swarms’, investigates a solution through the integration of large language model-driven agentic AI with edge computing architectures. We demonstrate that an edge-enabled approach significantly enhances scalability and resilience, as validated through a wildfire search-and-rescue use case achieving improved coverage and reduced mission times. How can these combined technologies further unlock the potential of decentralized, autonomous multi-agent systems for critical applications?
The Erosion of Centralized Control: A Paradigm Shift in Collective Intelligence
Conventional artificial intelligence often relies on single agents – isolated systems designed to perform specific tasks. However, these systems frequently falter when confronted with the unpredictable nature of real-world environments. Dynamic scenarios, characterized by incomplete information, unforeseen obstacles, and constantly changing conditions, overwhelm the pre-programmed responses of single agents. Their rigid architectures struggle to adapt, leading to errors, inefficiencies, and ultimately, system failure. The limitations stem from an inability to process the sheer volume of data and react effectively to novel situations – a stark contrast to the flexible and resilient problem-solving capabilities observed in natural systems like insect colonies or flocks of birds. Consequently, a new approach is needed to address the inherent complexities of operating in truly dynamic and unpredictable settings.
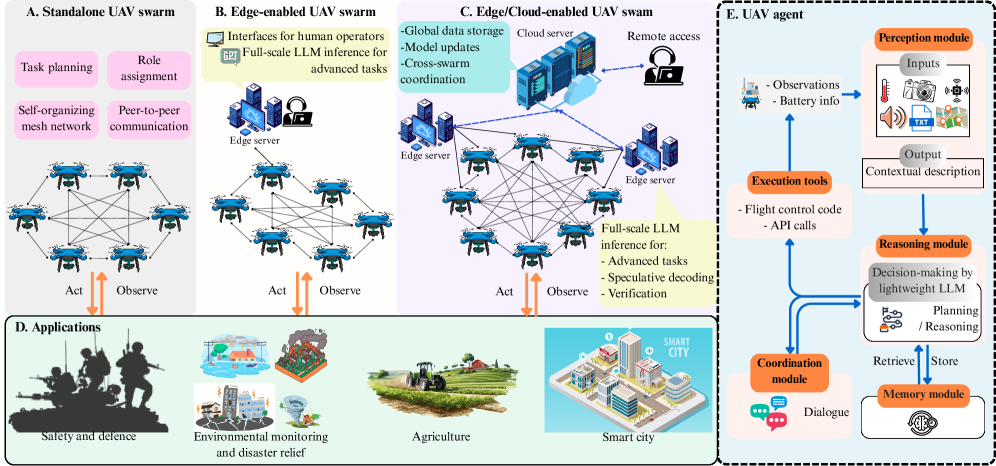
Agentic AI systems, particularly those utilizing collaborative unmanned aerial vehicle (UAV) swarms, represent a significant advancement in addressing complex challenges across diverse fields. Unlike traditional robotics reliant on centralized control, these systems distribute intelligence amongst numerous, relatively simple agents-the UAVs-allowing for increased robustness and adaptability. This decentralized approach enables the swarm to maintain functionality even with individual agent failures, and to respond effectively to unpredictable environmental changes. By leveraging collective sensing, computation, and actuation, agentic swarms can tackle tasks exceeding the capabilities of single robots or conventional automated systems, offering scalable solutions for applications ranging from precision agriculture and infrastructure inspection to search and rescue operations and environmental monitoring. The inherent flexibility and resilience of this paradigm promises to unlock new possibilities in dynamic, real-world scenarios where pre-programmed responses are insufficient.
The evolution of artificial intelligence is increasingly favoring systems that prioritize distributed intelligence over centralized, monolithic control. Rather than relying on a single, powerful entity to dictate actions, agentic swarms – collections of autonomous agents – distribute decision-making across the group. This paradigm shift allows for remarkable robustness; individual failures don’t cripple the entire system, and adaptability flourishes as the swarm responds to dynamic conditions through local interactions. The resulting emergent behavior – complex, coordinated actions arising from simple rules – offers a pathway to solving problems previously intractable for single agents, mirroring the efficiency and resilience observed in natural systems like ant colonies or bird flocks. This focus on collective intelligence promises solutions that are not simply programmed, but evolve to meet challenges in real-time.
Deconstructing Intelligence: A Cognitive Architecture for Swarm Systems
The Reasoning Module functions as the central processing unit within the swarm architecture, responsible for translating high-level objectives into a series of executable actions. This decomposition process involves analyzing the overall goal, identifying necessary sub-tasks, and sequencing these sub-tasks to achieve the desired outcome. The module doesn’t simply react to stimuli; it proactively plans, considering potential obstacles and resource allocation. This hierarchical task breakdown enables the swarm to address complex challenges that exceed the capabilities of individual agents by distributing the workload and coordinating collective effort. Effective operation requires the module to dynamically adjust the task decomposition based on real-time feedback and changing environmental conditions, ensuring robust and adaptable swarm behavior.
Chain-of-Thought (CoT) Reasoning enhances decision-making in intelligent swarms by enabling the system to generate intermediate reasoning steps between input and output. This process involves decomposing a problem into a series of logically connected inferences, allowing the swarm to explicitly articulate its rationale. CoT improves strategic planning by facilitating more robust and explainable solutions, particularly in complex scenarios where direct input-output mappings are insufficient. Implementation commonly involves prompting large language models to ‘think step-by-step’ or providing few-shot examples demonstrating the desired reasoning process, leading to improved accuracy and generalization compared to standard prompting techniques. The explicit representation of reasoning also allows for error analysis and refinement of the swarm’s cognitive processes.
Perception and Memory Modules function as critical support systems for swarm intelligence, enabling sustained operational capacity. The Perception Module processes sensory input from the environment – including data from onboard sensors and external sources – to build and maintain a real-time understanding of the surroundings. This data is then relayed to the Memory Module, which stores both short-term observations and long-term contextual knowledge. The Memory Module utilizes this stored information to provide the Reasoning Module with historical data, identify patterns, and anticipate future events, thereby improving decision-making and allowing the swarm to adapt to dynamic conditions and persist in complex environments.
Orchestrating Collective Action: The Mechanics of Swarm Coordination
The Coordination Module within the UAV swarm architecture enables inter-agent communication via a standardized messaging protocol, allowing each UAV to broadcast its status – including location, sensor data, and task progress – and receive updates from others. This facilitates collaborative decision-making and dynamic task allocation; agents can request assistance, share information regarding environmental conditions, or re-negotiate task assignments based on real-time data. The module employs a distributed architecture to minimize single points of failure and maximize robustness, ensuring continued operation even if individual agents experience communication disruptions. Furthermore, it incorporates mechanisms for conflict resolution, prioritizing requests and coordinating actions to prevent collisions or redundant efforts within the swarm.
Multi-agent system orchestration benefits from established frameworks designed to manage interactions between autonomous entities. CrewAI, LangGraph, and Autogen each offer distinct methodologies; CrewAI focuses on defining agent roles and responsibilities within a collaborative task, while LangGraph provides a graph-based approach to chaining language model agents for complex reasoning. Autogen, conversely, emphasizes conversational exchange between agents to collaboratively solve problems. These frameworks commonly utilize agent definitions specifying capabilities, goals, and communication protocols, enabling developers to implement complex swarm behaviors without managing low-level inter-agent communication directly. They facilitate features such as task decomposition, conflict resolution, and knowledge sharing, thereby improving the robustness and efficiency of multi-UAV operations.
The Action Execution Module functions as the interface between high-level mission plans and the physical control of the UAV swarm. This module receives validated action sequences from the coordination layer and translates them into specific, executable commands for each UAV. These commands encompass flight parameters – including velocity, altitude, and heading – as well as payload control, sensor activation, and data transmission directives. The module incorporates feedback loops, utilizing telemetry data from each UAV to dynamically adjust commands and ensure accurate execution, even in response to environmental changes or unforeseen obstacles. Successful operation relies on precise timing and synchronization across the swarm, managed through a distributed control architecture within the module.
Wildfire Response: A Demonstration of Intelligent Swarm Capabilities
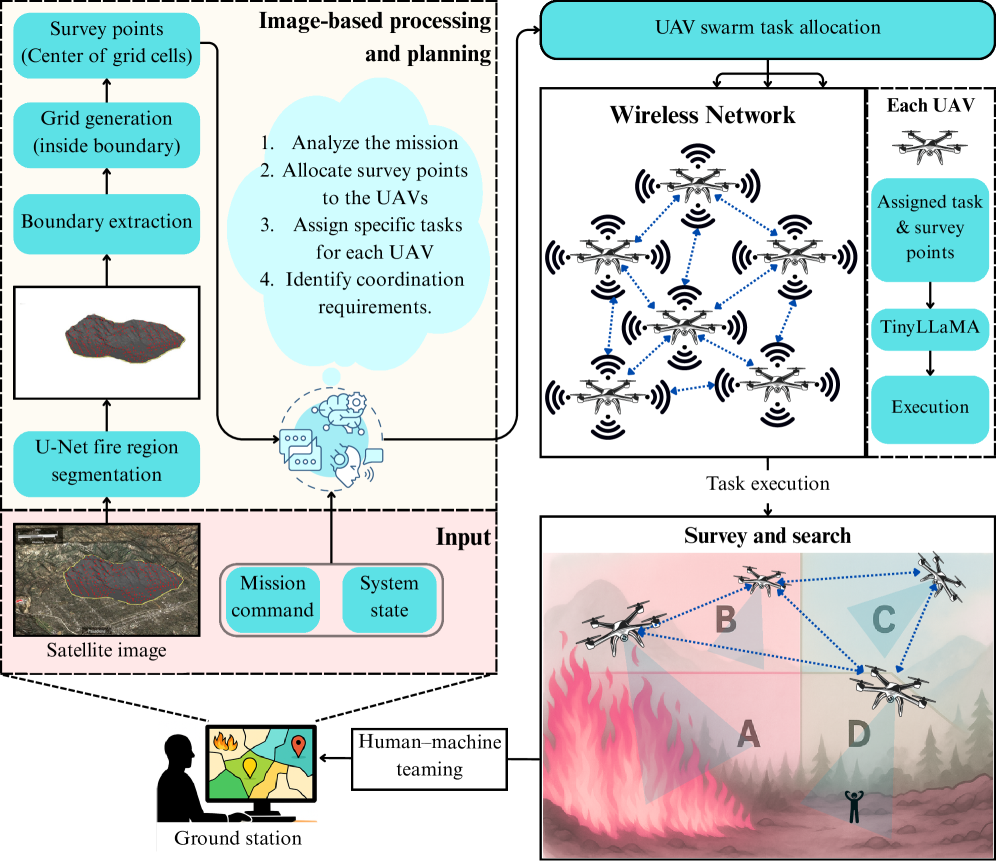
Unmanned aerial vehicle (UAV) swarms, architected with distributed intelligence, represent a paradigm shift in wildfire search and rescue (SAR) capabilities. These coordinated multi-robot systems surpass the limitations of single UAV deployments or traditional aerial methods by enabling rapid, large-scale assessments of fire-affected areas. The architecture facilitates parallel data acquisition and processing, allowing for the swift identification of heat signatures, stranded individuals, and critical infrastructure at risk. This distributed approach enhances resilience; the failure of a single unit does not compromise the entire mission. Moreover, the swarm’s collective sensing capabilities provide a more comprehensive understanding of the evolving fire front, informing evacuation strategies and resource allocation with unprecedented speed and precision, ultimately increasing the probability of successful rescues and minimizing damage.
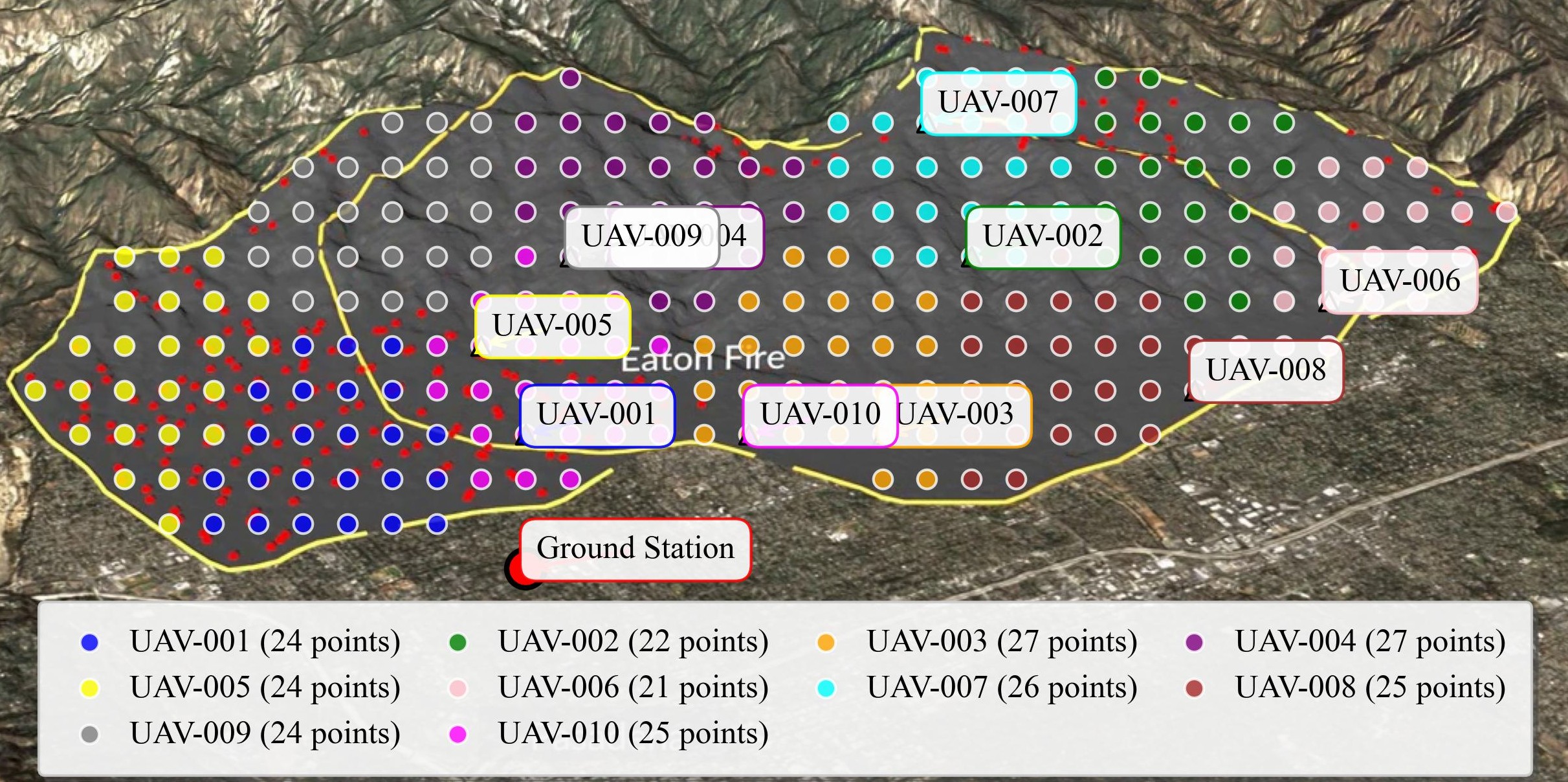
The system’s ability to rapidly pinpoint areas requiring urgent attention hinges on U-Net segmentation, a sophisticated image analysis technique applied to satellite imagery. This process doesn’t simply identify fire perimeters, but meticulously delineates critical features – structures at risk, evacuation routes potentially blocked, and the precise location of active flames – with a high degree of accuracy. By processing these images, the U-Net model generates detailed heatmaps that guide the UAV swarm, enabling it to bypass unaffected areas and concentrate resources on zones demanding immediate response. This targeted approach minimizes flight times, conserves battery power, and ultimately enhances the effectiveness of search and rescue operations by focusing attention where it’s most needed.
The system’s rapid response during wildfire search and rescue operations is directly attributable to its innovative integration of edge and cloud computing within a UAV swarm. By processing initial data onboard each drone – at the ‘edge’ – the swarm can quickly identify potential victims or critical infrastructure, bypassing the latency of relying solely on cloud transmission. This pre-processed information is then intelligently relayed to a central cloud server for broader analysis and coordinated response. Benchmarking reveals a significant performance advantage; utilizing this Edge/Cloud-Enabled approach, the UAV swarm completes missions in under 25 minutes with eight units, a considerable improvement over the 30+ minutes required by simpler, ‘greedy’ assignment strategies that lack this distributed processing capability. This optimized workflow translates to faster interventions and a heightened potential for saving lives and protecting property in dynamic, time-sensitive wildfire scenarios.
The Trajectory of Swarm Intelligence: Scalability and Lightweight Cognition
The integration of compact Large Language Models, such as TinyLLaMA, is redefining the capabilities of unmanned aerial vehicles (UAVs) operating in challenging environments. These lightweight LLMs facilitate onboard reasoning, allowing UAVs to process information and make decisions autonomously, even when disconnected from centralized control or cloud infrastructure. This localized intelligence is particularly crucial for resource-constrained platforms where computational power and energy are limited; it enhances operational resilience by mitigating the risks associated with communication delays or failures. By shifting cognitive load from external servers to the UAV itself, this approach enables more responsive and adaptable swarm behaviors, paving the way for applications requiring robust and independent aerial systems.
The system’s adaptable architecture permits deployment across a spectrum of operational scenarios, ranging from fully autonomous, standalone swarms to configurations leveraging edge and cloud computing resources. This flexibility is achieved through a modular design, allowing unmanned aerial vehicles (UAVs) to function independently when communication is limited or unavailable – crucial for missions in remote or contested environments. Conversely, when bandwidth and processing power are accessible, the system seamlessly integrates with edge servers and cloud infrastructure, enhancing collective intelligence, facilitating complex task allocation, and enabling real-time data analysis. This dual capability ensures the solution can be precisely tailored to the demands of specific applications, optimizing performance and resilience while minimizing resource consumption – a key advantage for diverse deployments from localized search and rescue to large-scale environmental monitoring.
Recent trials utilizing a swarm of twelve unmanned aerial vehicles (UAVs) demonstrate a substantial improvement in mission completion time through an innovative algorithmic approach. The system consistently finished designated tasks in under seventeen minutes, a noteworthy advancement when contrasted with the over twenty-two minutes required by a conventional, greedy algorithm. This performance boost isn’t simply a matter of speed; it highlights the scalability and efficiency gained by distributing intelligence across the swarm. The results suggest a pathway toward more rapid response times and broader operational capabilities in scenarios demanding coordinated aerial robotics, effectively showcasing how optimized algorithms can unlock the full potential of UAV swarms for time-sensitive applications.
The pursuit of decentralized autonomy in UAV swarms, as detailed in the article, necessitates a departure from centralized control paradigms. This echoes Henri Poincaré’s sentiment: “It is through science that we arrive at truth.” The rigorous application of mathematical principles to algorithm design, particularly within the constraints of edge computing, becomes paramount. The article’s focus on agentic AI doesn’t merely aim for functional operation; it strives for provable correctness, ensuring that each UAV’s decision-making process is grounded in logical consistency, even amidst the unpredictable conditions of a wildfire search-and-rescue scenario. This isn’t simply about building a system that works; it’s about constructing one that is inherently reliable through mathematical validation.
Beyond the Swarm: Future Directions
The confluence of agentic systems and edge computation, as demonstrated through the UAV swarm paradigm, necessitates a renewed focus on formal verification. Current approaches, largely empirical, lack the mathematical rigor demanded of safety-critical deployments. A ‘working’ system, however robustly tested, remains fundamentally incomplete without a provable guarantee of behavior. The core challenge lies not merely in scaling autonomy, but in establishing a formal language capable of specifying, and verifying, the intent of a distributed, learning agent.
The wildfire search-and-rescue application, while compelling, obscures a deeper problem. True decentralization requires more than simply distributing computation; it demands a robust theory of consensus in the presence of imperfect information and asynchronous operation. Current multi-agent systems often rely on implicit assumptions about global knowledge, rendering them fragile in genuinely dynamic environments. A mathematically sound model of distributed belief revision is therefore paramount.
Future work must move beyond the pursuit of ‘intelligence’ and concentrate on demonstrable correctness. The elegance of a solution is not measured by its performance on a benchmark, but by the simplicity and clarity of its underlying logic. Until the principles of decentralized autonomy are grounded in formal methods, the promise of truly scalable, resilient systems will remain, regrettably, a simulation.
Original article: https://arxiv.org/pdf/2601.14437.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Off Campus Season 1 Soundtrack Guide
- Chainsaw Man Volume 24’s Cover Art Reveals a Brand-New Denji
- X-Men ’97 Finally Gave Gambit the Hero Moment He Deserved
- 46 Years Later, The Mandalorian & Grogu Answers A Major Empire Strikes Back Question
- 10 Worst End-Game Couples In Sitcom History
- HoI4 fans harsh reactions to the announcement of another DLC pack
- Gold Rate Forecast
- DoorDash responds after customer uses AI to make food look bad and get a refund
- Emily Henry Says to ‘Trust the Vision’ For Beach Read Adaptation
- Hatsune Miku cosplayer goes viral selling $15 cups of “foot juice” to thirsty anime fans
2026-01-22 23:26